

授权公布号:CN110528858B
一种凸轮定位的爬架
失效
申请
2019-08-07
申请公布
2019-12-03
授权
2021-10-15
预估到期
2039-08-07
| 申请号 | CN201910727101.1 |
| 申请日 | 2019-08-07 |
| 申请公布号 | CN110528858A |
| 申请公布日 | 2019-12-03 |
| 授权公布号 | CN110528858B |
| 授权公告日 | 2021-10-15 |
| 分类号 | E04G3/28;E04G5/00 |
| 分类 | 建筑物; |
| 申请人名称 | 深圳市特辰科技股份有限公司 |
| 申请人地址 | 广东省深圳市罗湖区深南东路2017号华乐大厦6楼 |
专利法律状态
2023-08-18
专利权的终止
状态信息
未缴年费专利权终止;IPC(主分类):E04G3/28;专利号:ZL2019107271011;申请日:20190807;授权公告日:20211015;终止日期:
2021-10-15
授权
状态信息
授权
2019-12-27
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):E04G3/28;申请日:20190807
2019-12-03
公布
状态信息
公布
摘要
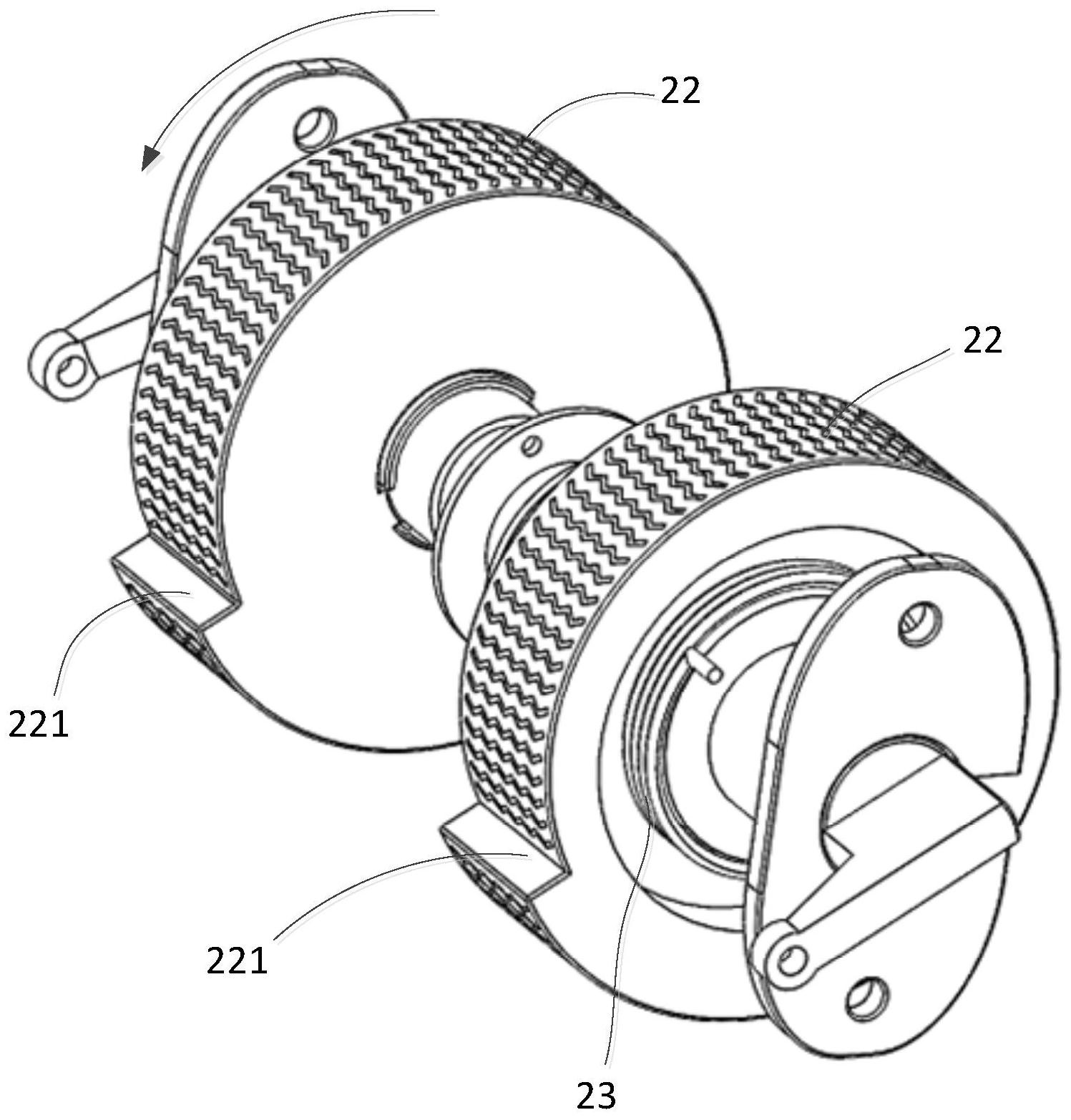
本发明公开了一种凸轮定位的爬架,包括组合为一体的导轨和若干导座、脚手板等,所述导座内设有凸轮和扭簧,所述扭簧为所述凸轮提供扭力使之始终与所述导轨相接触,所述导轨下降时带动当前与其配合的所有导座的凸轮共同挤压所述导轨直至所述导轨被锁死而无法下降,本发明无需手动布置额外的顶撑装置来支撑导轨,省去了导座上的顶撑装置;而且本发明中对于导轨停下的位置并不限制,导轨可以在任何点停下来施工,由于凸轮和导轨始终接触,爬架下降凸轮就开始受力压住导轨直至压紧,是柔性制动过程,且导轨下降时带动当前与其配合的所有导座的凸轮同时都受力挤压导轨,导轨上的重量协同的每一个导座上,避免上述缺陷。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有