

授权公布号:CN109823433B
一种吊钩式机器人爬架及其爬楼方法
有效
申请
2019-01-23
申请公布
2019-05-31
授权
2021-10-08
预估到期
2039-01-23
| 申请号 | CN201910061003.9 |
| 申请日 | 2019-01-23 |
| 申请公布号 | CN109823433A |
| 申请公布日 | 2019-05-31 |
| 授权公布号 | CN109823433B |
| 授权公告日 | 2021-10-08 |
| 分类号 | B62D57/024 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 深圳市特辰科技股份有限公司 |
| 申请人地址 | 广东省深圳市罗湖区深南东路2017号华乐大厦6楼 |
专利法律状态
2023-04-11
专利权的保全及其解除
状态信息
专利权的保全;IPC(主分类):B62D57/024;申请日:20190123;授权公告日:20211008;登记生效日:20230214
2021-10-08
授权
状态信息
授权
2019-06-25
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62D57/024;申请日:20190123
2019-05-31
公布
状态信息
公布
摘要
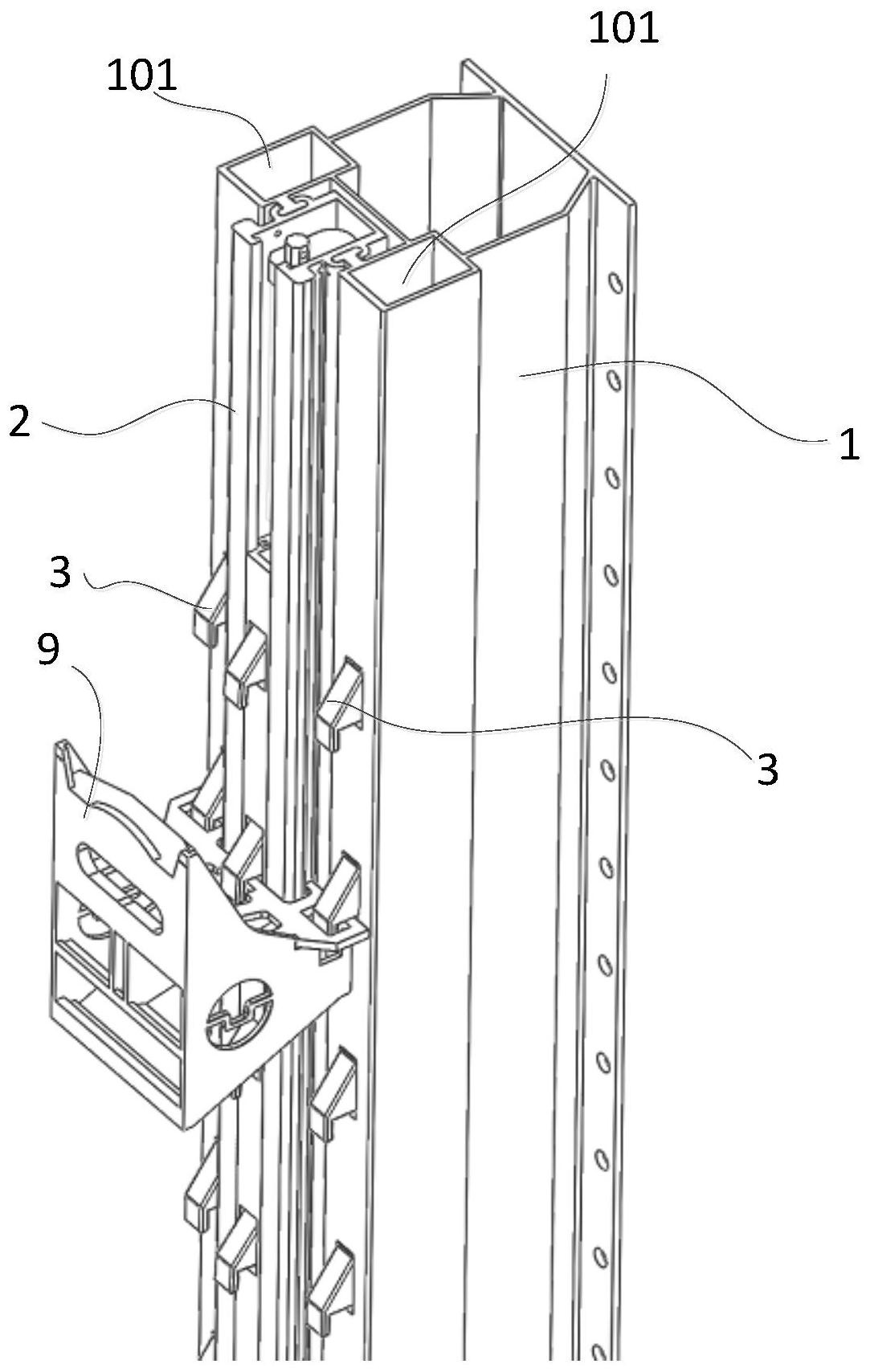
本发明公开了一种吊钩式机器人爬架及其爬楼方法,机器人爬架包括第一、第二导轨以及设置在第一导轨或第二导轨上的吊钩式联动机构,吊钩式联动机构包括:具有一伸出端的吊钩和保持所述伸出端伸出对应的所述第一导轨或第二导轨的弹性限位装置。通过机器人爬架中安装吊钩式联动机构,其中,吊钩式联动机构的弹性限位装置,可以保持吊钩伸出第一导轨或第二导轨的状态,方便机器人爬架的导轨借助安装在建筑物上的附墙座交替在建筑物上的爬行。该吊钩式联动机构在机器人爬架爬楼上升过程中与建筑物上的附墙座钩挂牢靠,无需如现有机械爪一样需要精确对准,工作方式简单有效,工作稳定性高,而且其结构简单易行,制备成本低廉。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有