

授权公布号:CN111203895B
一种防滑落的电力作业爬杆设备
有效
申请
2020-01-10
申请公布
2020-05-29
授权
2021-04-02
预估到期
2040-01-10
| 申请号 | CN202010025532.6 |
| 申请日 | 2020-01-10 |
| 申请公布号 | CN111203895A |
| 申请公布日 | 2020-05-29 |
| 授权公布号 | CN111203895B |
| 授权公告日 | 2021-04-02 |
| 分类号 | B25J19/00;B62D57/024;B25J11/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 兴化市万达电力工具有限公司 |
| 申请人地址 | 江苏省泰州市兴化市大邹镇化建路8号 |
专利法律状态
2021-04-02
授权
状态信息
授权
2021-03-23
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B25J11/00;登记生效日:20210310;变更事项:申请人;变更前:程沿江;变更后:兴化市万达电力工具有限公司;变更事项:地址;变更前:430061 湖北省武汉市武昌区公平路6号湖北省标准化与质量研究院403室;变更后:225700 江苏省泰州市兴化市大邹镇化建路8号
2020-06-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J11/00;申请日:20200110
2020-05-29
公布
状态信息
公布
摘要
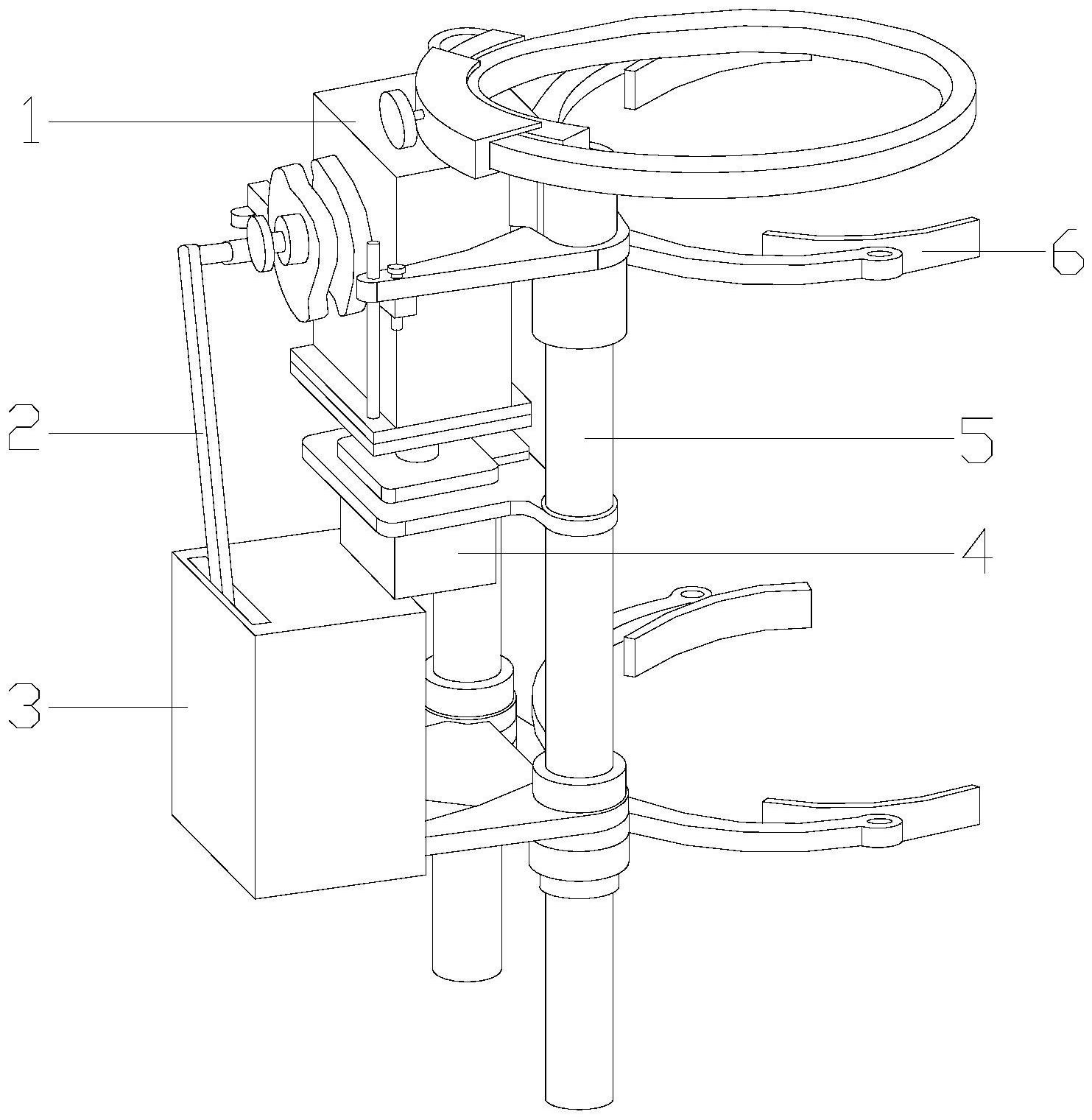
本发明公开了一种防滑落的电力作业爬杆设备,其结构包括爬杆控制器、连动杆、传动机箱、驱动电机、爬升支杆、线杆固定结构,爬杆控制器呈矩形结构且与水平面垂直,驱动电机安装于爬杆控制器底部且相互扣合,传动机箱位于驱动电机下方,电力作业爬杆设备通过安装有杆壁夹紧装置与藤条清除装置,在爬杆机器人作业过程中,夹块夹紧前将电线杆表面的青苔刮落,并且清理干净,提升夹块的附着力,避免发生打滑现象,同时将电线杆表面的藤蔓植物切断,避免对机器人行进造成影响,有效的提升了电力爬杆机器人的工作效率与安全性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有