

授权公布号:CN109663368B
一种智能玩具随从的方法及应用该方法的玩具机械人
有效
申请
2019-01-03
申请公布
2019-04-23
授权
2024-02-09
预估到期
2039-01-03
| 申请号 | CN201910010541.5 |
| 申请日 | 2019-01-03 |
| 申请公布号 | CN109663368A |
| 申请公布日 | 2019-04-23 |
| 授权公布号 | CN109663368B |
| 授权公告日 | 2024-02-09 |
| 分类号 | A63H13/04;A63H29/22;A63H30/00;A63H30/04 |
| 分类 | 运动;游戏;娱乐活动; |
| 申请人名称 | 东莞银辉玩具有限公司 |
| 申请人地址 | 广东省东莞市虎门镇怀德村 |
专利法律状态
2024-02-09
授权
状态信息
授权
2019-05-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A63H13/04;申请日:20190103
2019-04-23
公布
状态信息
公布
摘要
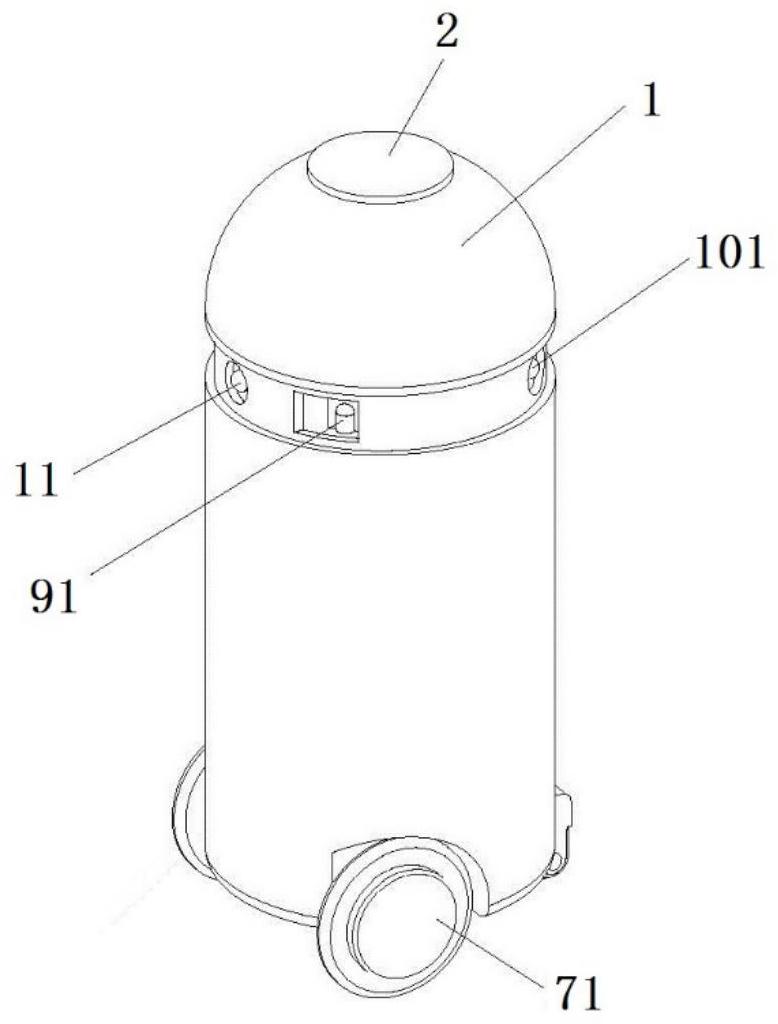
本发明公开了一种智能玩具随从的方法,包含以下步骤:1)身份配置:S1:发出搜寻信号搜寻领袖机械人;S2:当没有接收到回应信号时,该玩具机械人身份即为领袖机械人;S3:领袖机械人向其他玩具机械人发出配置其身份的信号;S4:进入游戏模式;2)游戏模式:S5:玩具机械人YX向玩具机械人YX+1传递跟随信号,玩具机械人YX+1接收并识别跟随信号,并根据接收到的跟随信号进行跟随移动;S6:所有玩具机械人形成了一队玩具机械人跟随移动。该方法中存在一个领袖机械人,其余的玩具机械人能自动依次跟随领袖机械人移动,使得多个玩具机械人能够形成依次跟随的队列,提高玩具的趣味性和可玩性。本发明还公开了一种应用所述智能玩具随从方法的玩具机械人。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有