

授权公布号:CN116513419B
一种潜水式履带排涝机器人
有效
申请
2023-06-21
申请公布
2023-08-01
授权
2023-09-01
预估到期
2043-06-21
| 申请号 | CN202310735757.4 |
| 申请日 | 2023-06-21 |
| 申请公布号 | CN116513419A |
| 申请公布日 | 2023-08-01 |
| 授权公布号 | CN116513419B |
| 授权公告日 | 2023-09-01 |
| 分类号 | B63C11/52;E03F1/00;E03F5/22;E03F5/14;B62D55/08;B62D55/14;B62D55/24;B62D55/30;B01D29/64;B01D29/96;B01D29/11 |
| 分类 | 船舶或其他水上船只;与船有关的设备; |
| 申请人名称 | 亚太泵阀有限公司 |
| 申请人地址 | 江苏省泰州市泰兴经济开发区城东工业园 |
专利法律状态
2023-09-01
授权
状态信息
授权
2023-08-18
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B63C 11/52;专利申请号:2023107357574;申请日:20230621
2023-08-01
公布
状态信息
公布
摘要
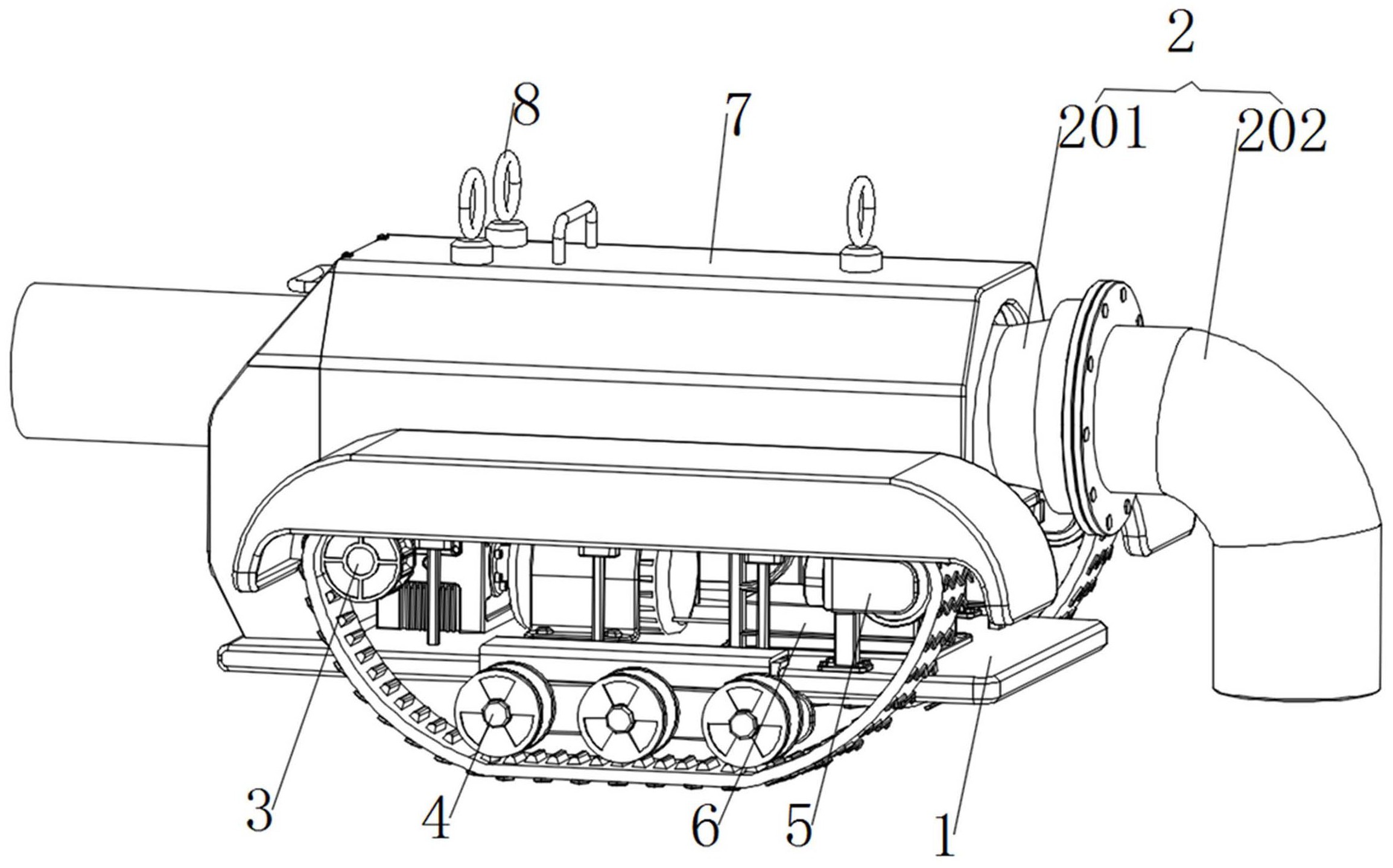
本发明公开了一种潜水式履带排涝机器人,涉及防洪排涝技术领域,包括:框架板,所述框架板靠近一侧的顶部设置有驱动机构。本发明使用时,工作人员通过遥控器发出信号,接收器接收后,控制潜水电机启动,潜水电机通过输出端驱动蜗轮蜗杆减速机,使得蜗轮蜗杆减速机的两个输出端同时转动,带动两个驱动杆转动,接着带动两个主动轮转动,接着拨动橡胶履带转动,带动支撑负重轮和导向轮转动,使得机器人潜入到隧道中的积水里,接着启动便捷式防洪抢险泵,通过吸水管吸水,排水管排水,排涝机器人驱动系统由潜水电机、蜗轮蜗杆减速机、驱动机构、负重组件和导向组件组成,可以完全潜入水下,进行深水区排涝。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有