

授权公布号:CN116715176B
一种麦克纳姆轮全向搬运智能机器人的控制方法
有效
申请
2023-08-10
申请公布
2023-09-08
授权
2023-12-15
预估到期
2043-08-10
| 申请号 | CN202311005957.0 |
| 申请日 | 2023-08-10 |
| 申请公布号 | CN116715176A |
| 申请公布日 | 2023-09-08 |
| 授权公布号 | CN116715176B |
| 授权公告日 | 2023-12-15 |
| 分类号 | B66F9/22;B66F9/14;B66F9/08;B66F9/075 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 龙合智能装备制造有限公司 |
| 申请人地址 | 福建省龙岩市永定区高陂镇环园路9号 |
专利法律状态
2023-12-15
授权
状态信息
授权
2023-09-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F9/22;申请日:20230810
2023-09-08
公布
状态信息
公布
摘要
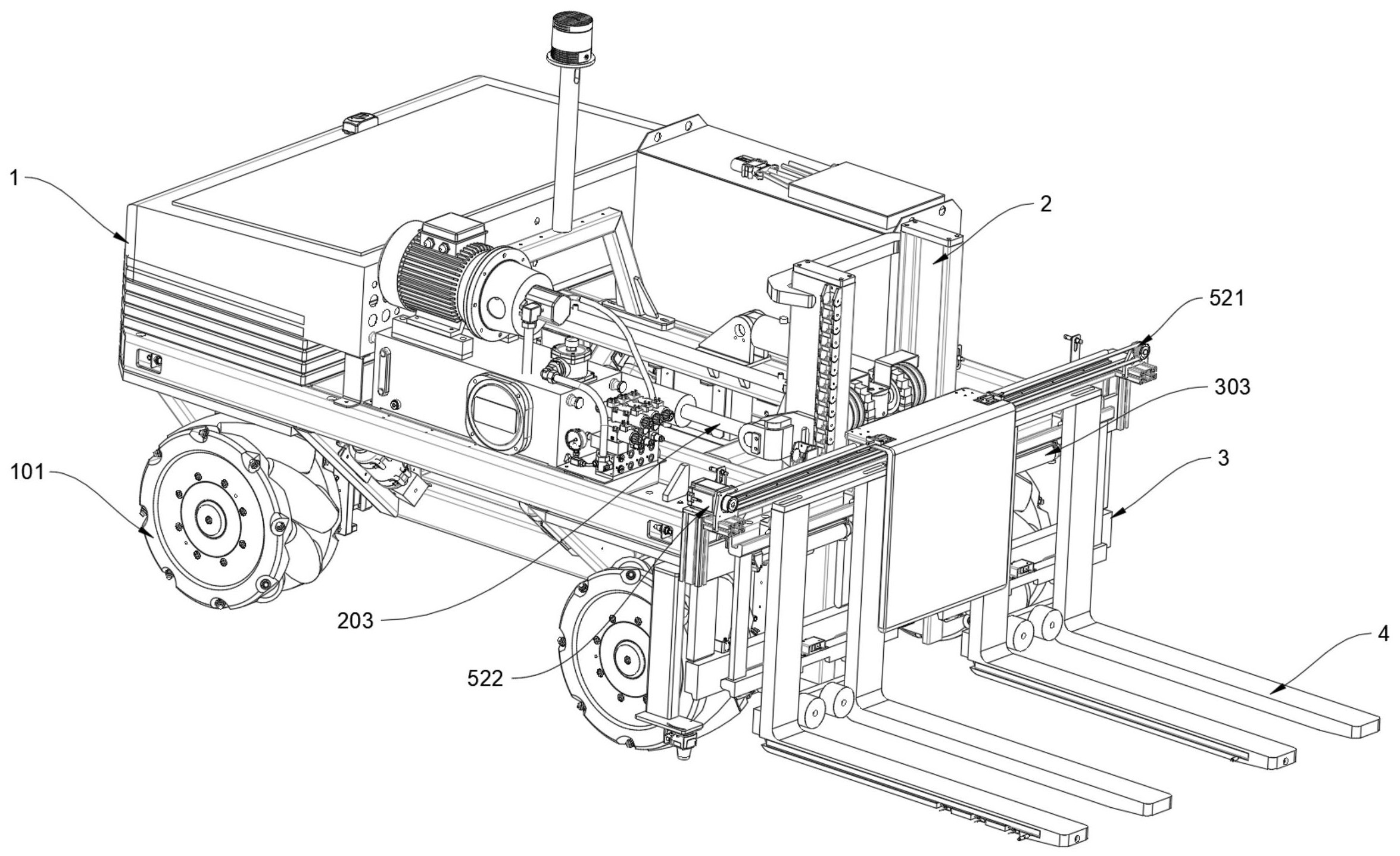
本发明涉及一种麦克纳姆轮全向搬运智能机器人的控制方法,所述搬运智能机器人包括:车体,所述车体设置四个麦克纳姆轮;货叉架,数量与所述横向驱动机构的数量相同,横向并列设置于所述侧移架的前端;配重组件;所述控制方法包括:当货叉架需要叉取两个并列的货物时,执行:S11,驱动所述搬运智能机器人正对两个并列的货物,控制麦克纳姆轮使所述搬运智能机器人的左右中心线与两个并列的货物的中心线对齐;S12,通过所述横向驱动机构调节货叉架的位置与两个货物相匹配,通过所述纵向驱动机构初步同时抬起两个货物;S13,调节所述配重组件,使所述搬运智能机器人及货物的重心平衡后,进一步同时抬起两个货物。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有