

授权公布号:CN116974289B
一种用于集装箱装卸搬运的智能机器人导航避障方法
有效
申请
2023-09-22
申请公布
2023-10-31
授权
2023-12-15
预估到期
2043-09-22
| 申请号 | CN202311228453.5 |
| 申请日 | 2023-09-22 |
| 申请公布号 | CN116974289A |
| 申请公布日 | 2023-10-31 |
| 授权公布号 | CN116974289B |
| 授权公告日 | 2023-12-15 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 龙合智能装备制造有限公司 |
| 申请人地址 | 福建省龙岩市永定区高陂镇环园路9号 |
专利法律状态
2023-12-15
授权
状态信息
授权
2023-11-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20230922
2023-10-31
公布
状态信息
公布
摘要
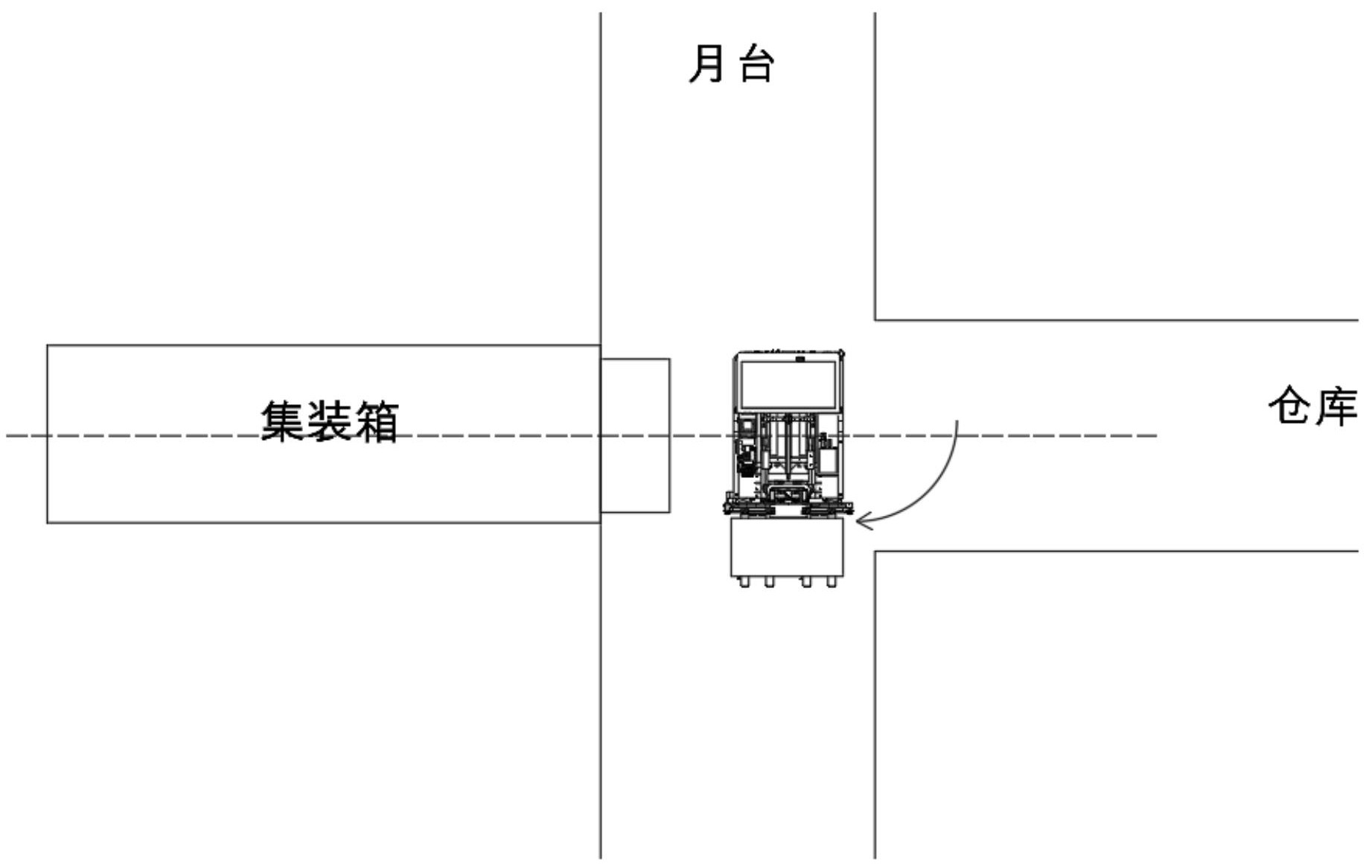
本发明涉及一种用于集装箱装卸搬运的智能机器人导航避障方法,所述方法包括以下步骤:所述智能机器人前进入库取货后,控制所述智能机器人倒车出库,得到集装箱入口的三维数据,将所述三维数据作为所述智能机器人导航避障算法的地图数据;以后退方式行驶到靠近集装箱入口的位置;控制所述智能机器人旋转90°,使所述智能机器人的侧方朝向所述集装箱入口,控制所述智能机器人行驶至所述智能机器人的中心位于所述集装箱入口的中心线上;控制所述智能机器人旋转90°,使所述智能机器人的前方朝向所述集装箱入口,控制所述智能机器人前进进入所述集装箱入口;控制所述智能机器人行驶到集装箱内的预定位置并放下货物。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有