

授权公布号:CN113715019B
机器人控制方法、装置、机器人和存储介质
有效
申请
2021-08-31
申请公布
2021-11-30
授权
2023-12-29
预估到期
2041-08-31
| 申请号 | CN202111014129.4 |
| 申请日 | 2021-08-31 |
| 申请公布号 | CN113715019A |
| 申请公布日 | 2021-11-30 |
| 授权公布号 | CN113715019B |
| 授权公告日 | 2023-12-29 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海擎朗智能科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区金海路1000号56号楼11楼 |
专利法律状态
2023-12-29
授权
状态信息
授权
2021-12-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20210831
2021-11-30
公布
状态信息
公布
摘要
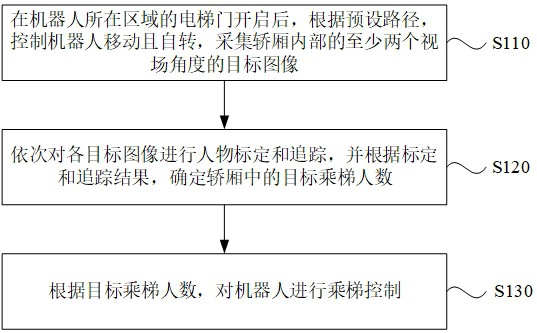
本申请实施例公开了一种机器人控制方法、装置、机器人和存储介质,涉及控制领域。该方法包括:在机器人所在区域的电梯门开启后,根据预设路径,控制机器人移动且自转,以采集轿厢内部的至少两个视场角度的目标图像;依次对各所述目标图像进行人物标定和追踪,并根据标定和追踪结果,确定所述轿厢中的目标乘梯人数;根据所述目标乘梯人数,对所述机器人进行乘梯控制。本申请提高了确定结果准确度,同时避免了机器人等待时间过长对机器人,同时减少了无效乘梯过多对电梯的作业效率的影响,从而提高了机器人和电梯的作业效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有