

授权公布号:CN113844964B
机器人乘梯的控制方法、装置、电子设备和存储介质
有效
申请
2021-10-11
申请公布
2021-12-28
授权
2023-08-22
预估到期
2041-10-11
| 申请号 | CN202111181283.0 |
| 申请日 | 2021-10-11 |
| 申请公布号 | CN113844964A |
| 申请公布日 | 2021-12-28 |
| 授权公布号 | CN113844964B |
| 授权公告日 | 2023-08-22 |
| 分类号 | B66B1/06;B66B1/46;B66B1/34;B66B5/00 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 上海擎朗智能科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区金海路1000号56号楼11楼 |
专利法律状态
2023-08-22
授权
状态信息
授权
2021-12-28
公布
状态信息
公布
摘要
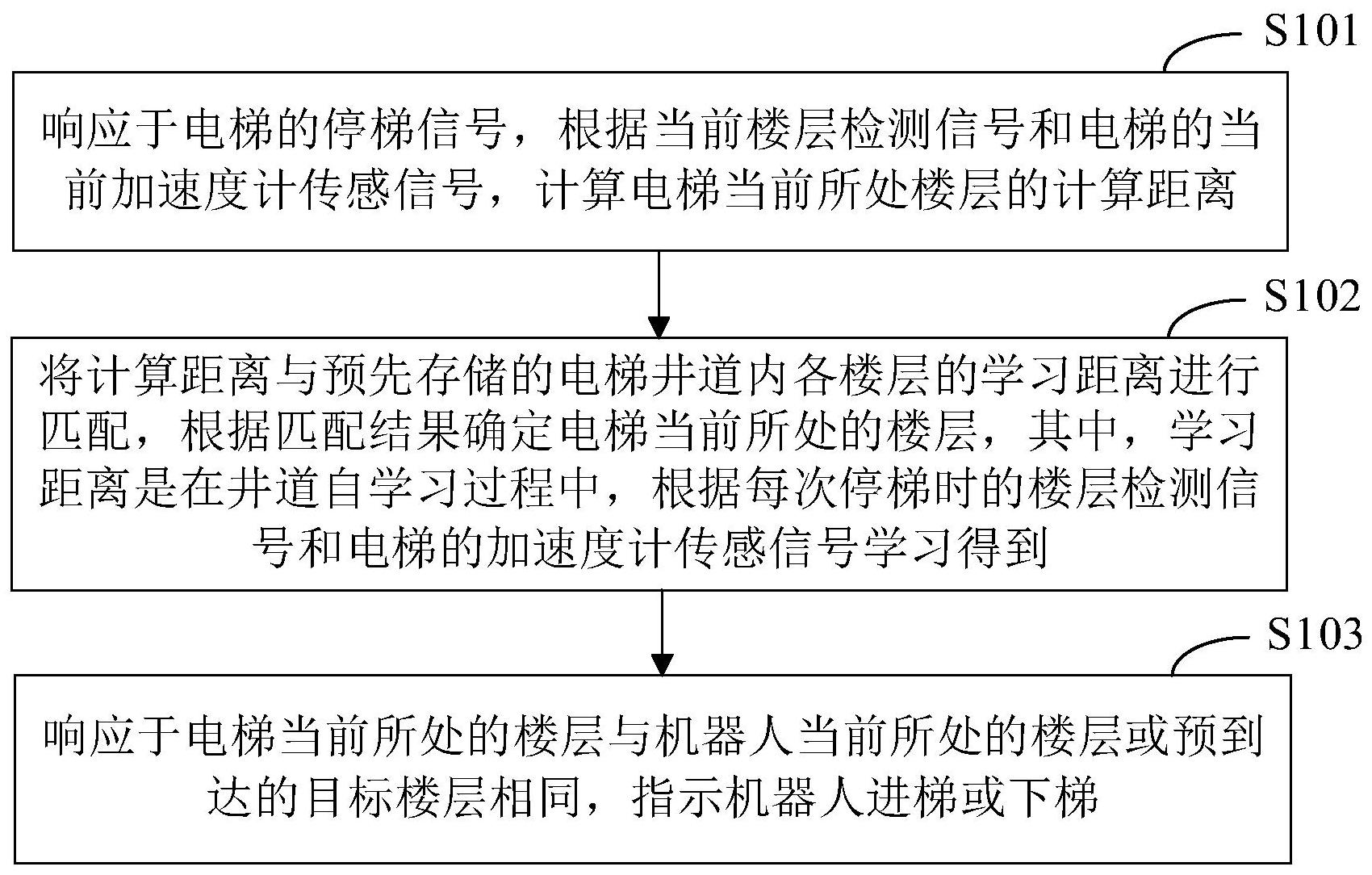
本申请公开了一种机器人乘梯的控制方法、装置、电子设备和存储介质。该方法包括:响应于电梯的停梯信号,根据当前楼层检测信号和所述电梯的当前加速度计传感信号,计算所述电梯当前所处楼层的计算距离;将所述计算距离与预先存储的电梯井道内各楼层的学习距离进行匹配,根据匹配结果确定所述电梯当前所处的楼层,其中,所述学习距离是在井道自学习过程中,根据每次停梯时的楼层检测信号和电梯的加速度计传感信号学习得到;响应于所述电梯当前所处的楼层与机器人当前所处的楼层或预到达的目标楼层相同,指示机器人进梯或下梯。本申请的技术方案可以提高机器人乘梯的准确性和成功率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有