

授权公布号:CN113469141B
一种物品运送方法、机器人及介质
有效
申请
2021-08-09
申请公布
2021-10-01
授权
2024-03-05
预估到期
2041-08-09
| 申请号 | CN202110908415.9 |
| 申请日 | 2021-08-09 |
| 申请公布号 | CN113469141A |
| 申请公布日 | 2021-10-01 |
| 授权公布号 | CN113469141B |
| 授权公告日 | 2024-03-05 |
| 分类号 | G06V20/52;G06V20/56;G06Q10/083 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 上海擎朗智能科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区金海路1000号56号楼11楼 |
专利法律状态
2024-03-05
授权
状态信息
授权
2021-10-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20210809
2021-10-01
公布
状态信息
公布
摘要
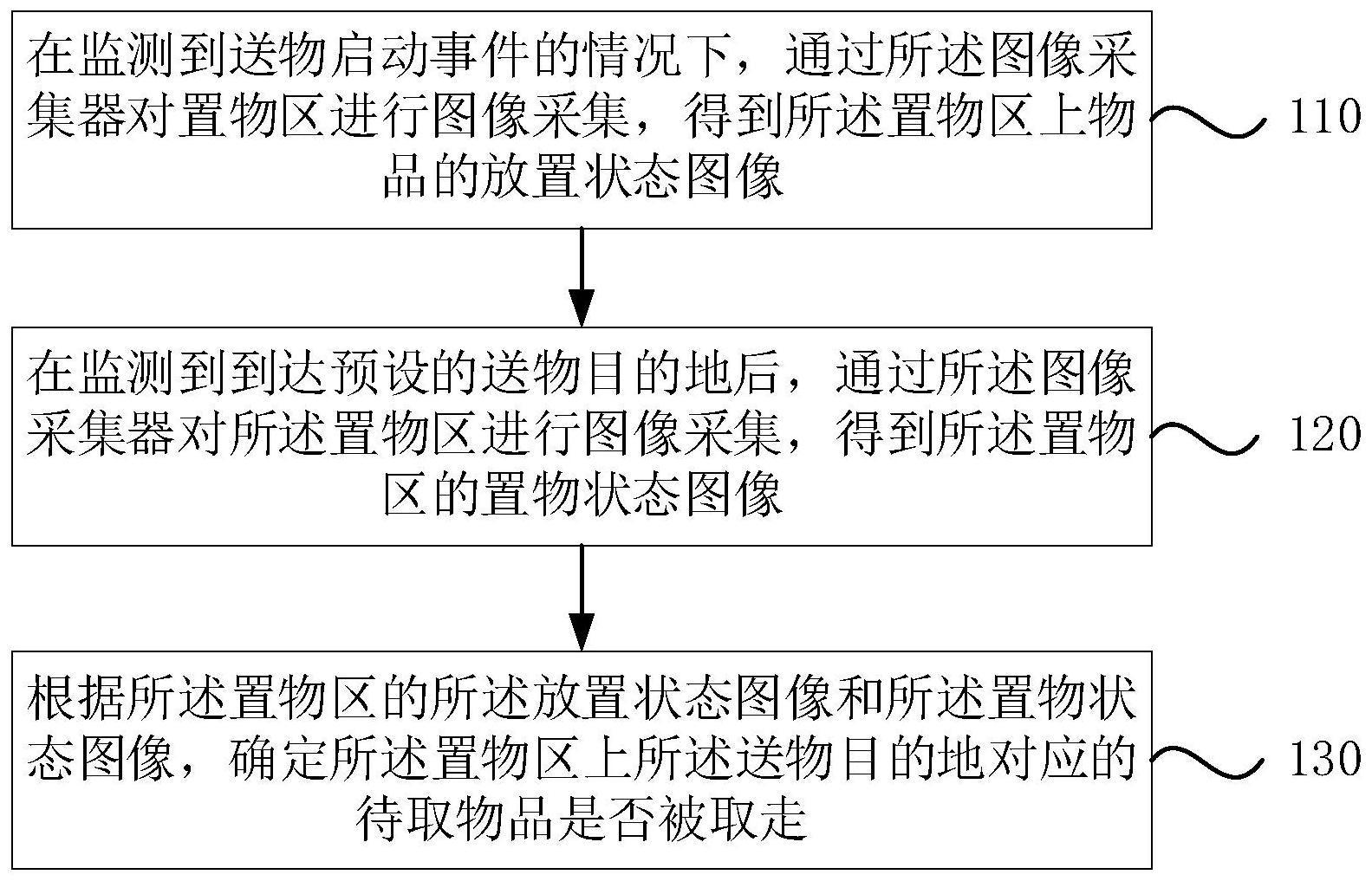
本发明实施例公开了一种物品运送方法、机器人及介质。该方法包括:在监测到送物启动事件的情况下,通过所述图像采集器对置物区进行图像采集,得到所述置物区上物品的放置状态图像;在监测到到达预设的送物目的地后,通过所述图像采集器对所述置物区进行图像采集,得到所述置物区的置物状态图像;根据所述置物区的所述放置状态图像和所述置物状态图像,确定所述置物区上所述送物目的地对应的待取物品是否被取走。通过运行本发明实施例所提供的技术方案,可以解决机器人无法确定物品实际的运送情况以及由于需要等待用户确认物品接收,降低了后续任务的执行效率的问题,实现提高机器人物品运送的有效性和效率的效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有