

授权公布号:CN113184054B
机器人底盘及机器人底盘控制方法
有效
申请
2021-05-20
申请公布
2021-07-30
授权
2023-09-15
预估到期
2041-05-20
| 申请号 | CN202110552952.4 |
| 申请日 | 2021-05-20 |
| 申请公布号 | CN113184054A |
| 申请公布日 | 2021-07-30 |
| 授权公布号 | CN113184054B |
| 授权公告日 | 2023-09-15 |
| 分类号 | B62D21/18;B60G17/015;B60G17/019 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 上海擎朗智能科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区金海路1000号56号楼11楼 |
专利法律状态
2023-09-15
授权
状态信息
授权
2021-08-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62D21/18;申请日:20210520
2021-07-30
公布
状态信息
公布
摘要
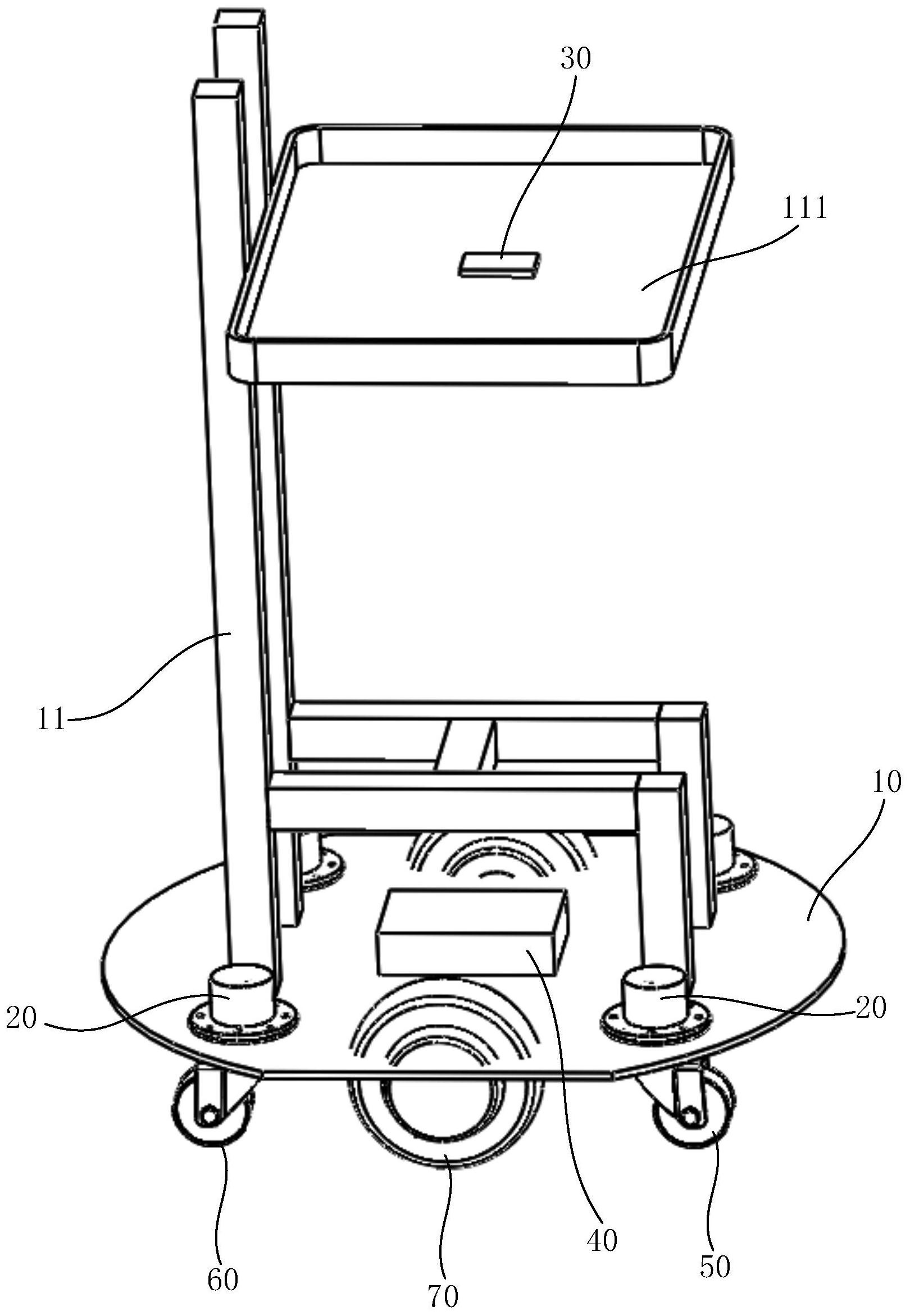
本发明公开了一种机器人底盘及机器人底盘控制方法,该机器人底盘包括:底盘板、电磁调节模块、姿态传感器和电磁控制板,底盘板上设置有从动轮和驱动轮,从动轮通过电磁调节模块安装于底盘板上,电磁调节模块能够带动相应的从动轮相对于底盘板上升或下降,姿态传感器用于实时检测机器人的姿态信息,电磁控制板安装于底盘板上并分别与姿态传感器和电磁调节模块电连接,电磁控制板根据姿态信息计算偏移量并根据偏移量启动对应的电磁调节模块以使电磁调节模块带动相应的从动轮相对于底盘板升降。上述的机器人底盘能够实时进行姿态校正,能够适应各种不同场景的减震需求,具有地面适应性高的有益效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有