

授权公布号:CN111459158B
一种机器人及其行进控制方法
有效
申请
2020-03-11
申请公布
2020-07-28
授权
2023-09-15
预估到期
2040-03-11
| 申请号 | CN202010165733.6 |
| 申请日 | 2020-03-11 |
| 申请公布号 | CN111459158A |
| 申请公布日 | 2020-07-28 |
| 授权公布号 | CN111459158B |
| 授权公告日 | 2023-09-15 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 上海擎朗智能科技有限公司 |
| 申请人地址 | 上海市浦东新区中国(上海)自由贸易试验区新金桥路27号13号楼2层 |
专利法律状态
2023-09-15
授权
状态信息
授权
2020-08-21
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200311
2020-07-28
公布
状态信息
公布
摘要
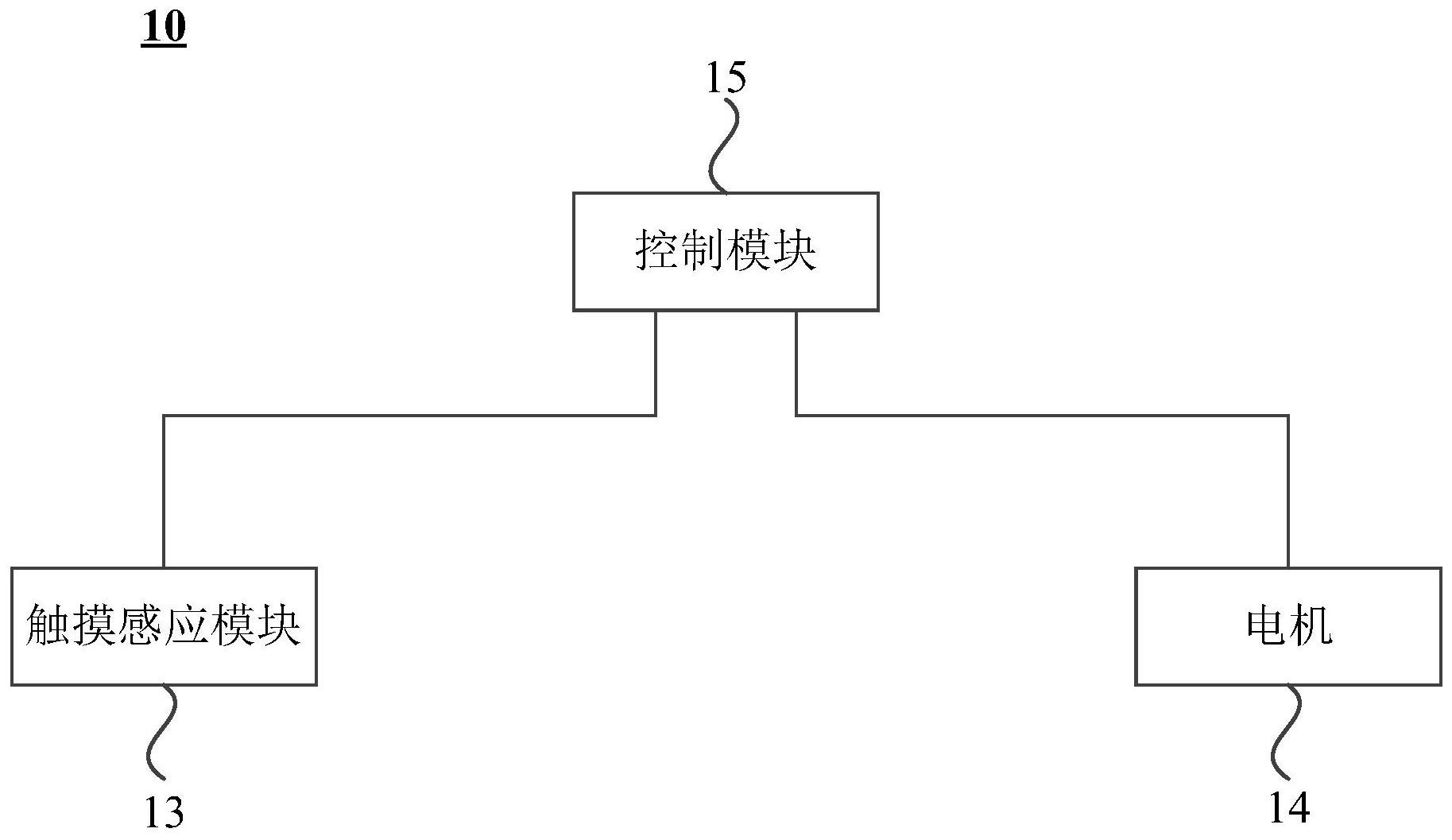
本发明公开了机器人及其行进控制方法,机器人包括触摸感应模块、电机和控制模块,控制模块与触摸感应模块和电机连接;控制模块与电机连接,用于控制电机通电,触摸感应模块用于在感应到用户的触摸操作之后,向控制模块发送手推功能启动提示信号;控制模块还用于根据手推功能启动提示信号控制电机断电,以使用户手动推拉机器人,避开障碍物。如此可以简单快速实现对机器人的移动,增强机器人的可控性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有