

授权公布号:CN107160428B
机器人的胯部关节及机器人
有效
申请
2017-06-09
申请公布
2017-09-15
授权
2023-12-12
预估到期
2037-06-09
| 申请号 | CN201710433953.0 |
| 申请日 | 2017-06-09 |
| 申请公布号 | CN107160428A |
| 申请公布日 | 2017-09-15 |
| 授权公布号 | CN107160428B |
| 授权公告日 | 2023-12-12 |
| 分类号 | B25J17/02;B25J19/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海未来伙伴机器人有限公司 |
| 申请人地址 | 上海市徐汇区钦州北路1122号90幢8层 |
专利法律状态
2023-12-12
授权
状态信息
授权
2017-09-15
公布
状态信息
公布
摘要
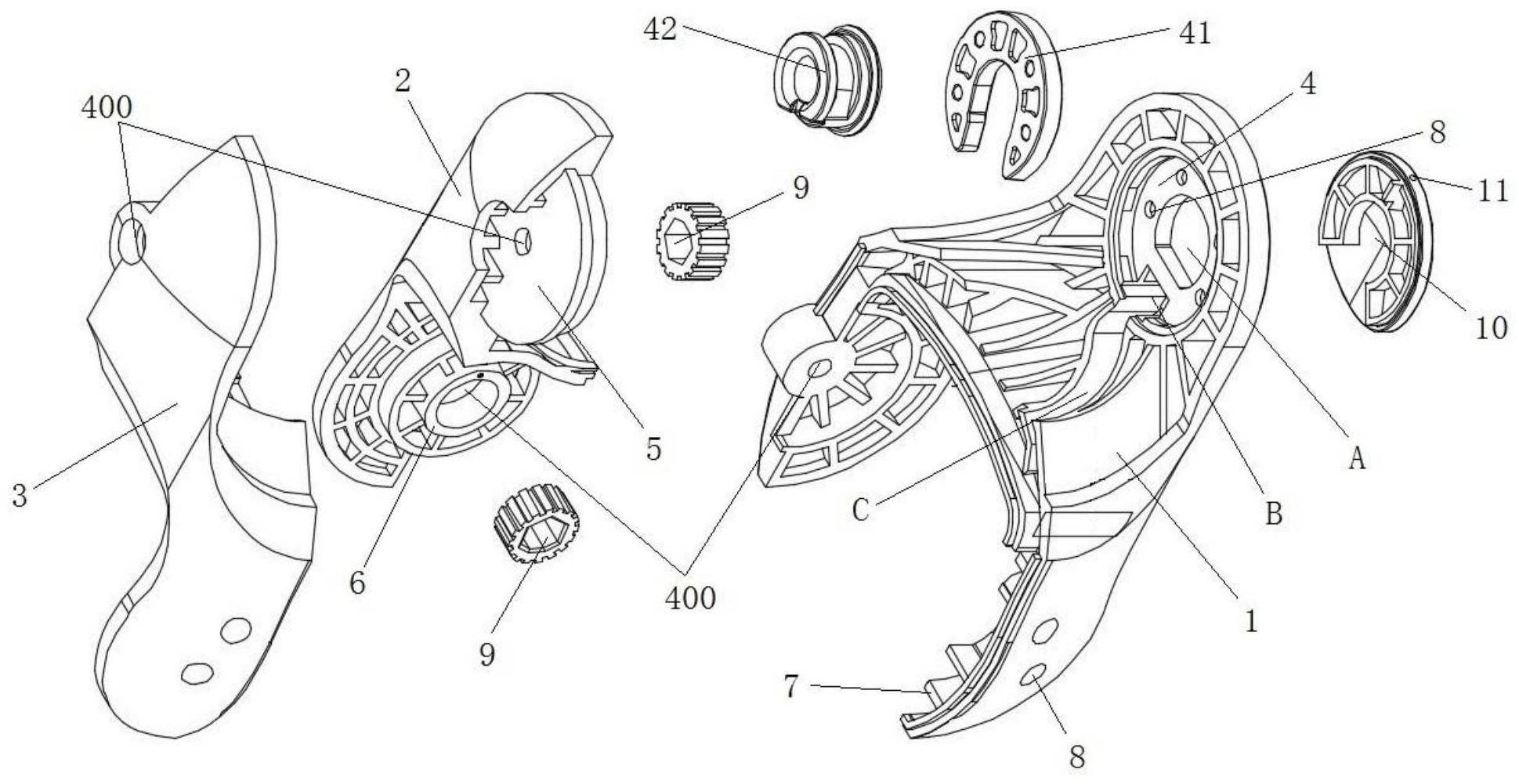
本发明技术方案公开了一种机器人的胯部关节及机器人,包括可拆卸装配的走线骨架和辅助骨架,所述走线骨架上设有用于安装舵机线的过线位、用于卡设端子的卡线位以及用于舵机线走线的走线槽,所述辅助骨架包括主动骨架和从动骨架,所述主动骨架和所述从动骨架的结构相似且可拆卸安装。本发明技术方案通过在走线骨架上设置过线位、卡线位以及走线槽,在装配胯部关节时避免了压线的问题,同时也避免了胯部关节运动时可能会对舵机线造成摩擦的问题。通过将胯部关节分为主动骨架、从动骨架和走线骨架三个部分,拆装方便。胯部关节整体材质为塑胶,成本低,可塑性强,方便过线位、卡线位以及走线槽的设计,尺寸更精准。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有