

授权公布号:CN113050116B
机器人定位方法、装置、机器人和可读存储介质
有效
申请
2021-03-05
申请公布
2021-06-29
授权
2024-02-27
预估到期
2041-03-05
| 申请号 | CN202110246953.6 |
| 申请日 | 2021-03-05 |
| 申请公布号 | CN113050116A |
| 申请公布日 | 2021-06-29 |
| 授权公布号 | CN113050116B |
| 授权公告日 | 2024-02-27 |
| 分类号 | G01S17/88;G01S17/06 |
| 分类 | 测量;测试; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-02-27
授权
状态信息
授权
2021-07-16
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01S17/88;申请日:20210305
2021-06-29
公布
状态信息
公布
摘要
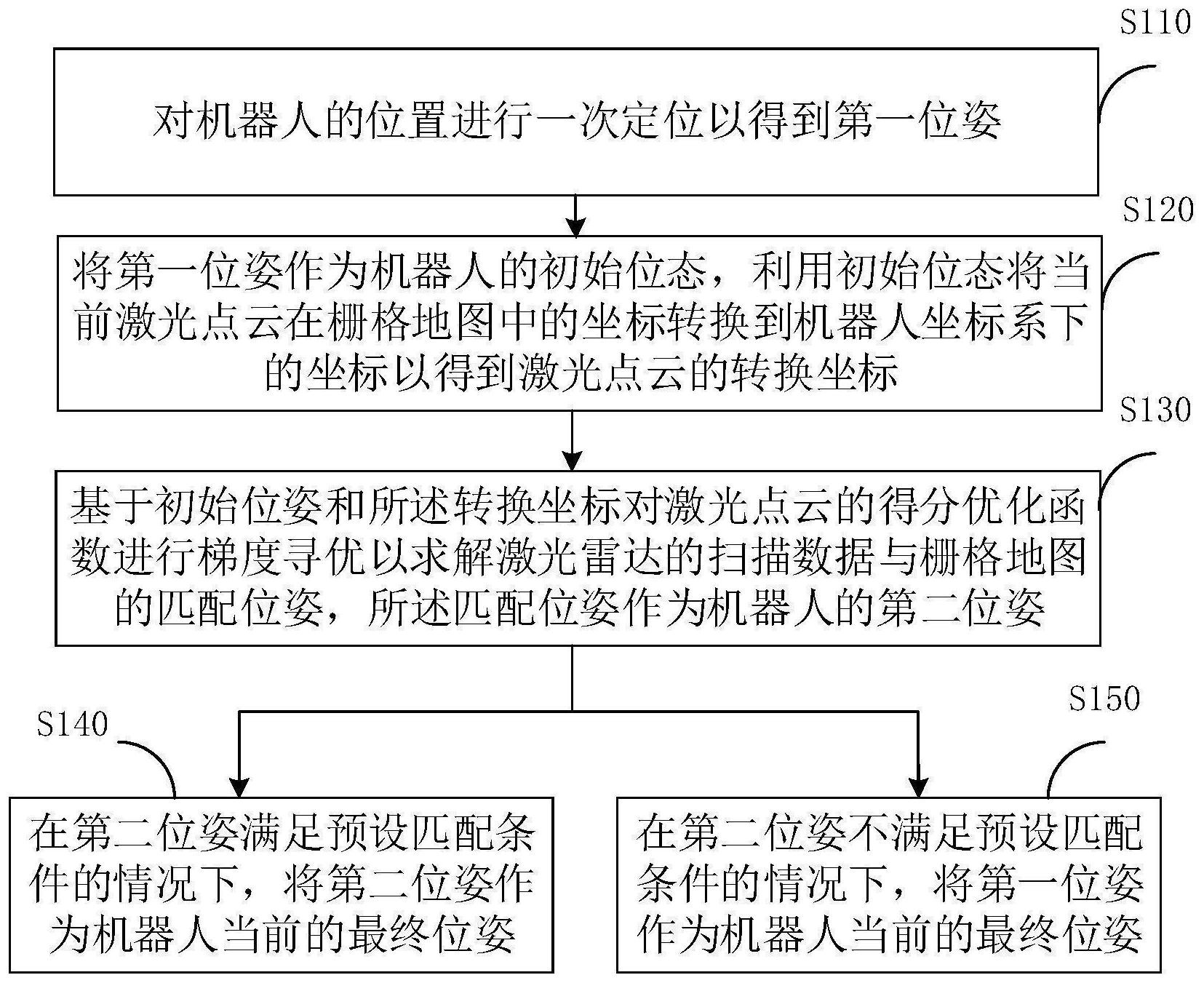
本申请实施例提供一种机器人定位方法、装置、机器人和可读存储介质,该方法包括:对机器人的位置进行一次定位以得到第一位姿;将第一位姿作为所述机器人的初始位姿,对激光点云坐标进行坐标转换,并利用转换后的坐标对相应激光点云的得分优化函数进行梯度寻优以求解扫描匹配位姿,该扫描匹配位姿作为机器人的第二位姿。最后,根据第二位姿是否满足预设匹配条件来选取第一位姿或第二位姿作为最终的定位结果。该技术方案能够适应不同的环境和场景,在不需要非常高的精度时能够定位稳定,而有些场景又能达到所需的精度,具有较强的定位鲁棒性,同时能够得到高精度的定位等。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有