

授权公布号:CN113031639B
机器人步长处理方法、装置、机器人控制设备及存储介质
有效
申请
2021-03-22
申请公布
2021-06-25
授权
2024-03-12
预估到期
2041-03-22
| 申请号 | CN202110304528.8 |
| 申请日 | 2021-03-22 |
| 申请公布号 | CN113031639A |
| 申请公布日 | 2021-06-25 |
| 授权公布号 | CN113031639B |
| 授权公告日 | 2024-03-12 |
| 分类号 | G05D1/49;G05D109/12N |
| 分类 | 控制;调节; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-03-12
授权
状态信息
授权
2021-07-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/08;申请日:20210322
2021-06-25
公布
状态信息
公布
摘要
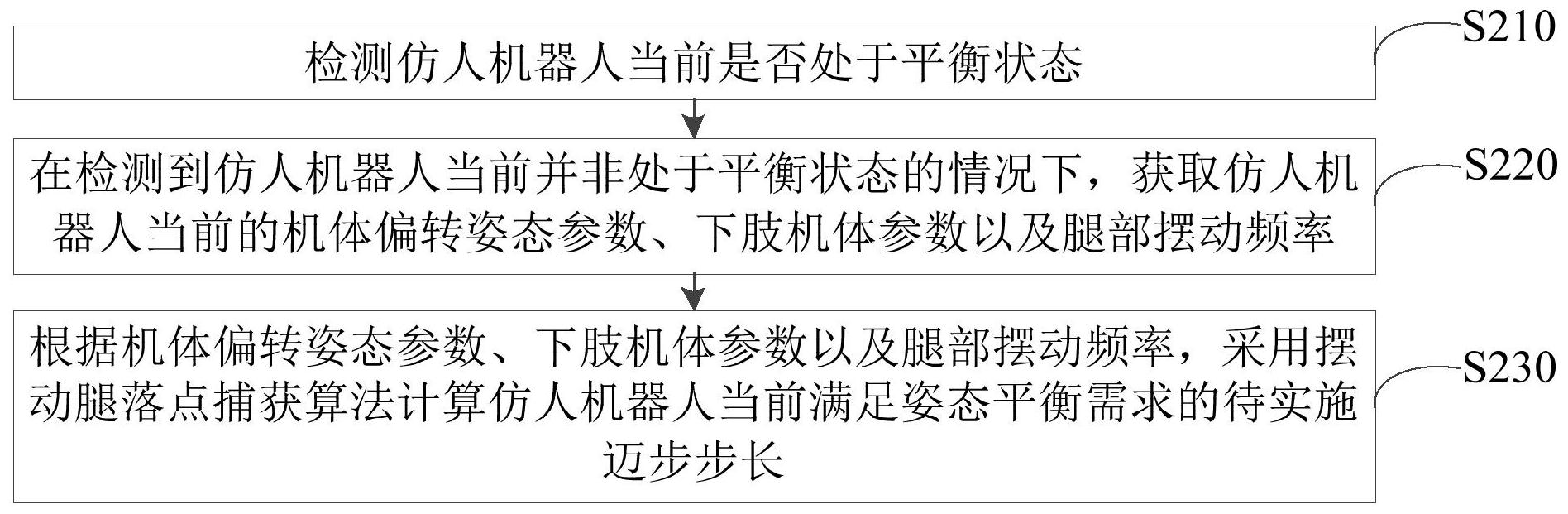
本申请提供一种机器人步长处理方法、装置、机器人控制设备及存储介质,涉及机器人控制技术领域。本申请在检测到仿人机器人当前并非处于平衡状态的情况下,会相应地获取仿人机器人当前的机体偏转姿态参数、下肢机体参数以及腿部摆动频率,而后直接根据得到的机体偏转姿态参数、下肢机体参数以及腿部摆动频率,运用摆动腿落点捕获算法自行计算仿人机器人当前满足姿态平衡需求的用于维持仿人机器人稳定状态的待实施迈步步长,以便于仿人机器人采纳计算出的步长进行运动后,能够恢复平衡状态,提升机器人抗干扰能力。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有