

授权公布号:CN114162067B
一种四足机器人及其总线模块
有效
申请
2021-12-16
申请公布
2022-03-11
授权
2024-03-15
预估到期
2041-12-16
| 申请号 | CN202111544871.6 |
| 申请日 | 2021-12-16 |
| 申请公布号 | CN114162067A |
| 申请公布日 | 2022-03-11 |
| 授权公布号 | CN114162067B |
| 授权公告日 | 2024-03-15 |
| 分类号 | B60R16/023;B62D57/032;B25J11/00 |
| 分类 | 一般车辆; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-03-15
授权
状态信息
授权
2022-03-11
公布
状态信息
公布
摘要
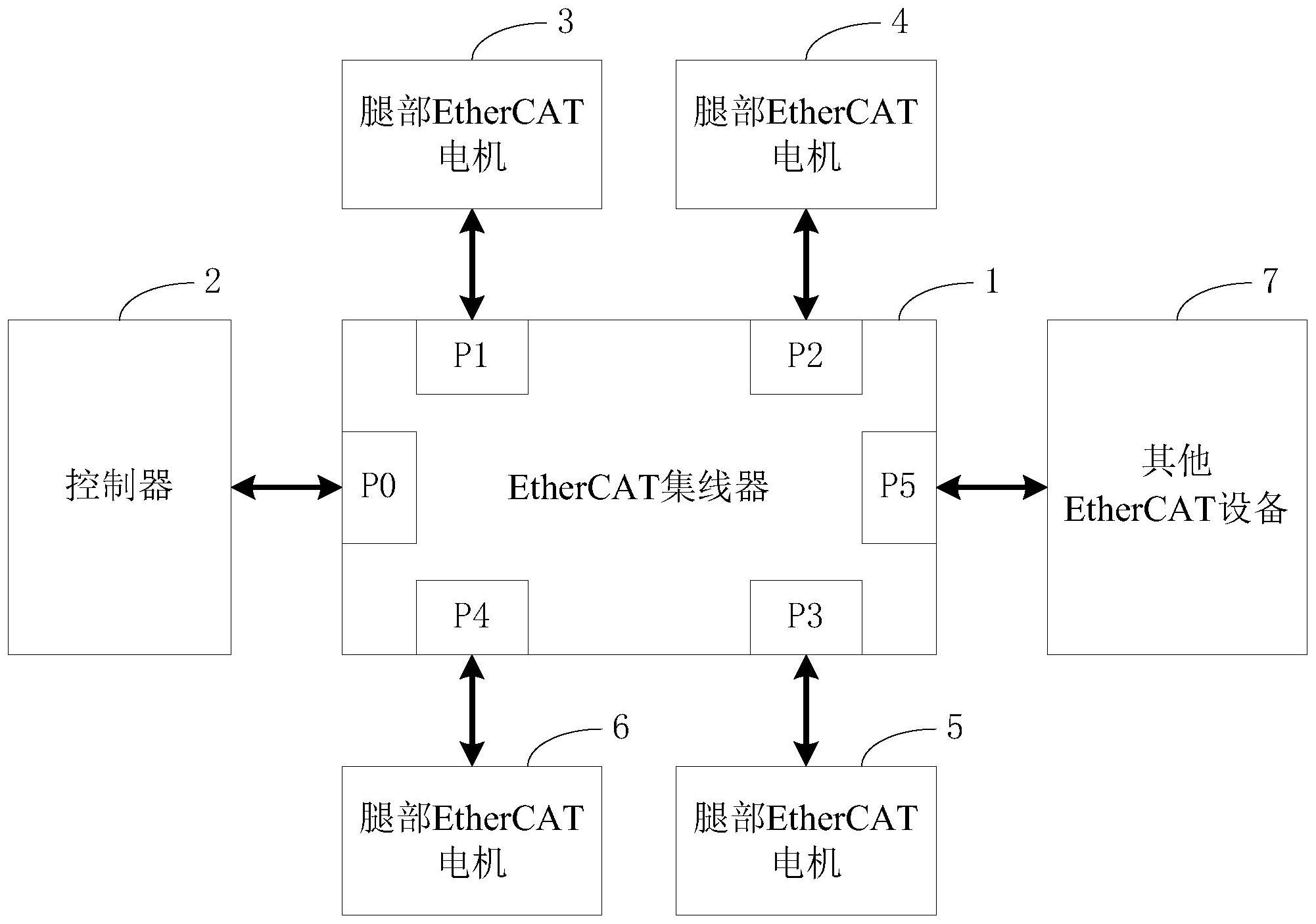
本申请适用于四足机器人技术领域,提供一种四足机器人及其总线模块,包括EtherCAT集线器,EtherCAT集线器包括第一接口、第二接口、第三接口、第四接口及第五接口和第六接口,第一接口用于连接四足机器人的控制器;第二接口至第六接口中的四个接口分别用于连接四足机器人的四条腿部的EtherCAT电机,剩余一个接口用于作为拓展接口连接其他EtherCAT设备;通过采用EtherCAT集线器可以实现EtherCAT星型拓扑结构,提高总线带宽,实现高速实时总线控制,简化走线,提高可装配和可维护性,降低硬件平台开发和调试难度,且方便实现其他EtherCAT设备扩展。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有