

授权公布号:CN114347020B
一种运动控制方法、运动控制装置及机器人
有效
申请
2021-12-22
申请公布
2022-04-15
授权
2024-02-13
预估到期
2041-12-22
| 申请号 | CN202111583810.0 |
| 申请日 | 2021-12-22 |
| 申请公布号 | CN114347020A |
| 申请公布日 | 2022-04-15 |
| 授权公布号 | CN114347020B |
| 授权公告日 | 2024-02-13 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-02-13
授权
状态信息
授权
2022-05-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20211222
2022-04-15
公布
状态信息
公布
摘要
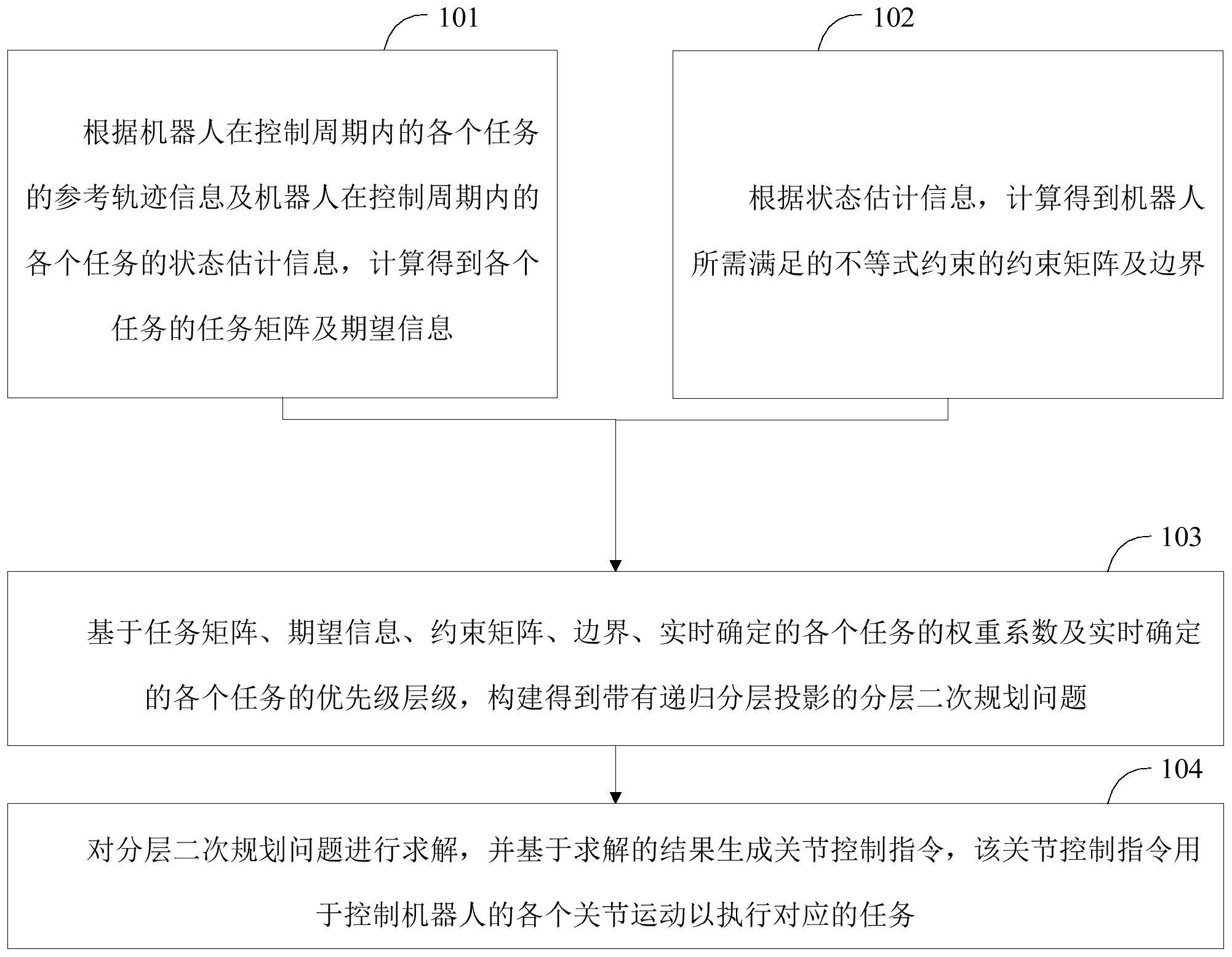
本申请公开了一种运动控制方法、运动控制装置、机器人及计算机可读存储介质。其中,该方法包括:根据机器人在控制周期内的各个任务的参考轨迹信息及机器人在控制周期内的各个任务的状态估计信息,计算得到各个任务的任务矩阵及期望信息;根据状态估计信息,计算得到机器人所需满足的不等式约束的约束矩阵及边界;基于以上获得的所有信息、实时确定的各个任务的权重系数及实时确定的各个任务的优先级层级,构建得到带有递归分层投影的分层二次规划问题;对分层二次规划问题进行求解,并基于求解的结果生成用于控制机器人的各个关节运动以执行对应的任务的关节控制指令。通过本申请方案,可保障机器人运行的平稳性及任务执行效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有