

授权公布号:CN112536796B
机器人控制方法、装置、计算机可读存储介质及机器人
有效
申请
2020-11-23
申请公布
2021-03-23
授权
2024-03-15
预估到期
2040-11-23
| 申请号 | CN202011320807.5 |
| 申请日 | 2020-11-23 |
| 申请公布号 | CN112536796A |
| 申请公布日 | 2021-03-23 |
| 授权公布号 | CN112536796B |
| 授权公告日 | 2024-03-15 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-03-15
授权
状态信息
授权
2021-03-23
公布
状态信息
公布
摘要
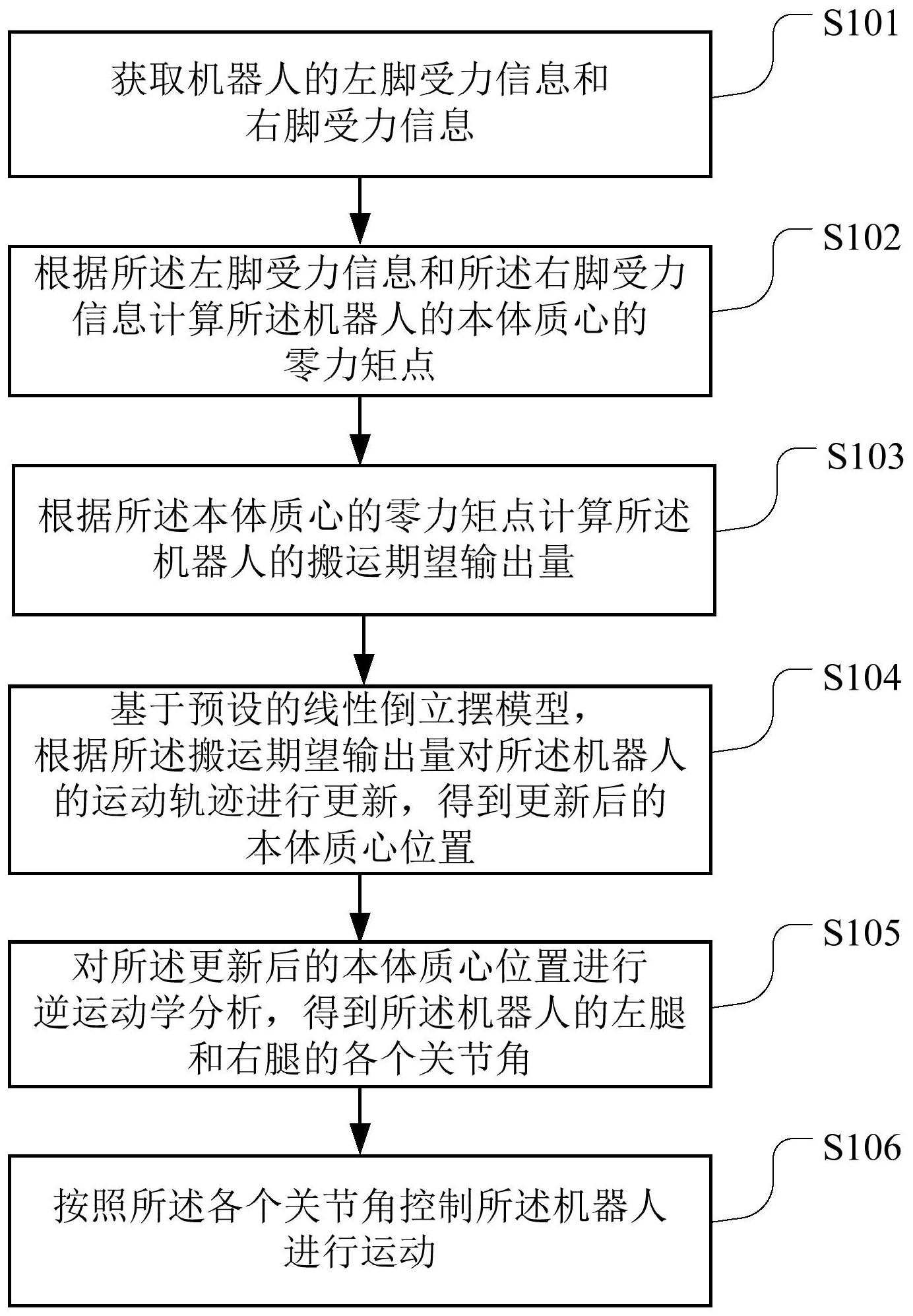
本申请属于机器人技术领域,尤其涉及一种机器人控制方法、装置、计算机可读存储介质及机器人。所述方法获取机器人的左脚受力信息和右脚受力信息;根据所述左脚受力信息和所述右脚受力信息计算所述机器人的本体质心的零力矩点;根据所述本体质心的零力矩点计算所述机器人的搬运期望输出量;基于预设的线性倒立摆模型,根据所述搬运期望输出量对所述机器人的运动轨迹进行更新,得到更新后的本体质心位置;对所述更新后的本体质心位置进行逆运动学分析,得到所述机器人的左腿和右腿的各个关节角;按照所述各个关节角控制所述机器人进行运动。通过本申请,可以保证机器人在搬起物体时质心在支撑范围内,极大提高了机器人的稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有