

授权公布号:CN111880544B
仿人机器人步态规划方法、装置和仿人机器人
有效
申请
2020-08-07
申请公布
2020-11-03
授权
2024-03-22
预估到期
2040-08-07
| 申请号 | CN202010788584.9 |
| 申请日 | 2020-08-07 |
| 申请公布号 | CN111880544A |
| 申请公布日 | 2020-11-03 |
| 授权公布号 | CN111880544B |
| 授权公告日 | 2024-03-22 |
| 分类号 | G05D1/43;G05D109/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-03-22
授权
状态信息
授权
2024-02-27
著录事项变更
状态信息
著录事项变更;IPC(主分类):G05D1/02;变更事项:发明人;变更前:王家俊 赵明国 熊友军;变更后:王家俊 熊友军
2020-11-20
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200807
2020-11-03
公布
状态信息
公布
摘要
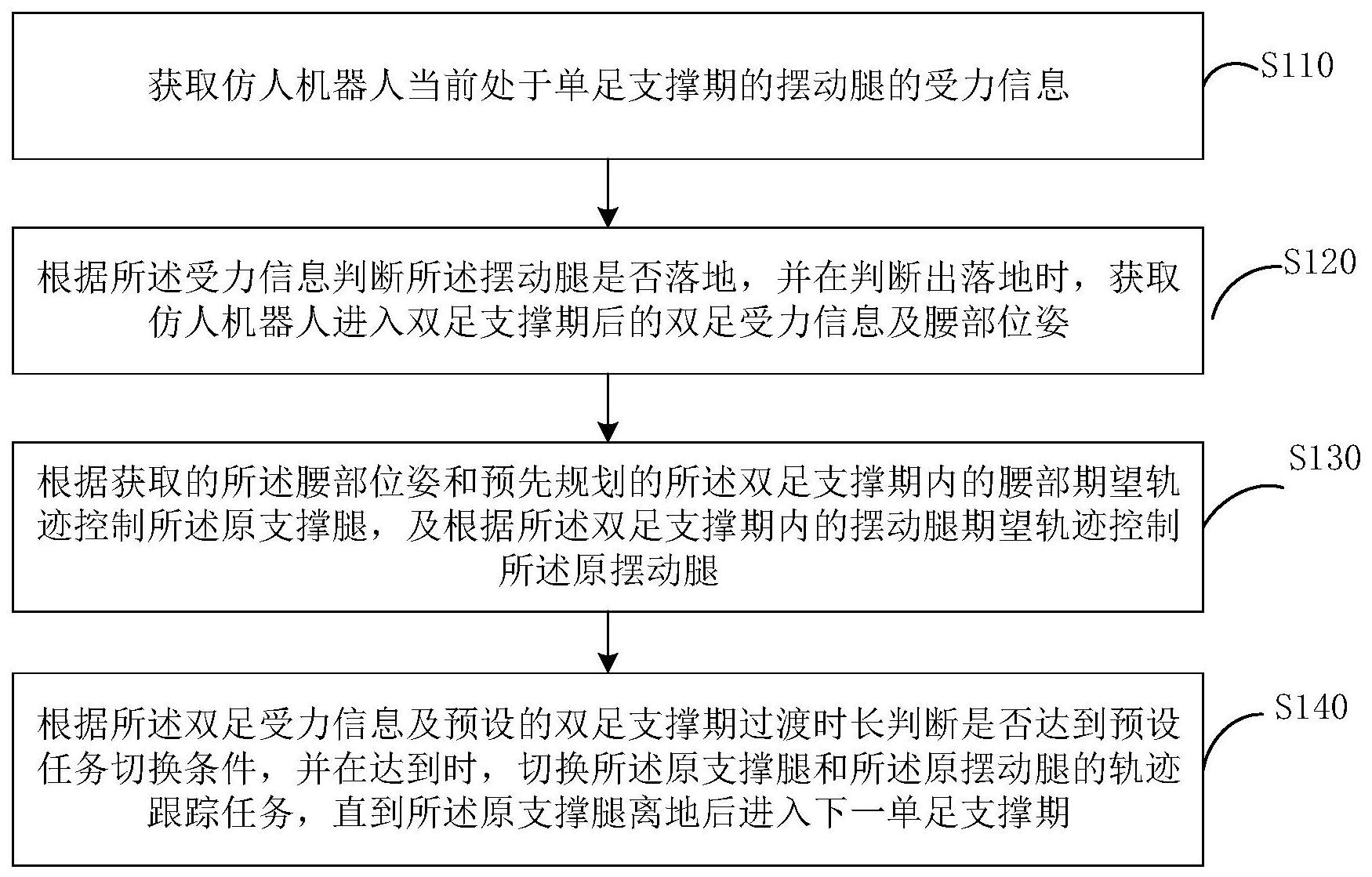
本申请实施例公开了一种仿人机器人步态规划方法、装置和仿人机器人,该方法包括:获取仿人机器人当前处于单足支撑期的摆动腿的受力信息;根据所述受力信息判断所述摆动腿是否落地,并在判断出落地时,获取所述仿人机器人进入双足支撑期后的双足受力信息及腰部位姿;根据所述腰部位姿和所述双足支撑期内的腰部期望轨迹控制原支撑腿,及根据摆动腿期望轨迹控制原摆动腿;根据所述双足受力信息及双足支撑期过渡时长判断是否达到预设任务切换条件,并在达到时切换所述原支撑腿和所述原摆动腿的轨迹跟踪任务。本申请的技术方案可以使仿人机器人在快速行走过程中实现支撑腿和摆动腿的平滑的交替切换,并保证仿人机器人的姿态和速度的动态稳定性等。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有