

授权公布号:CN110989585B
避奇异的步态规划方法、装置、可读存储介质及机器人
有效
申请
2019-11-28
申请公布
2020-04-10
授权
2024-02-02
预估到期
2039-11-28
| 申请号 | CN201911188763.2 |
| 申请日 | 2019-11-28 |
| 申请公布号 | CN110989585A |
| 申请公布日 | 2020-04-10 |
| 授权公布号 | CN110989585B |
| 授权公告日 | 2024-02-02 |
| 分类号 | G05D1/43;B62D57/032;G05D1/633;G05D1/247;G05D109/12N |
| 分类 | 控制;调节; |
| 申请人名称 | 深圳市优必选科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼 |
专利法律状态
2024-02-02
授权
状态信息
授权
2020-04-10
公布
状态信息
公布
摘要
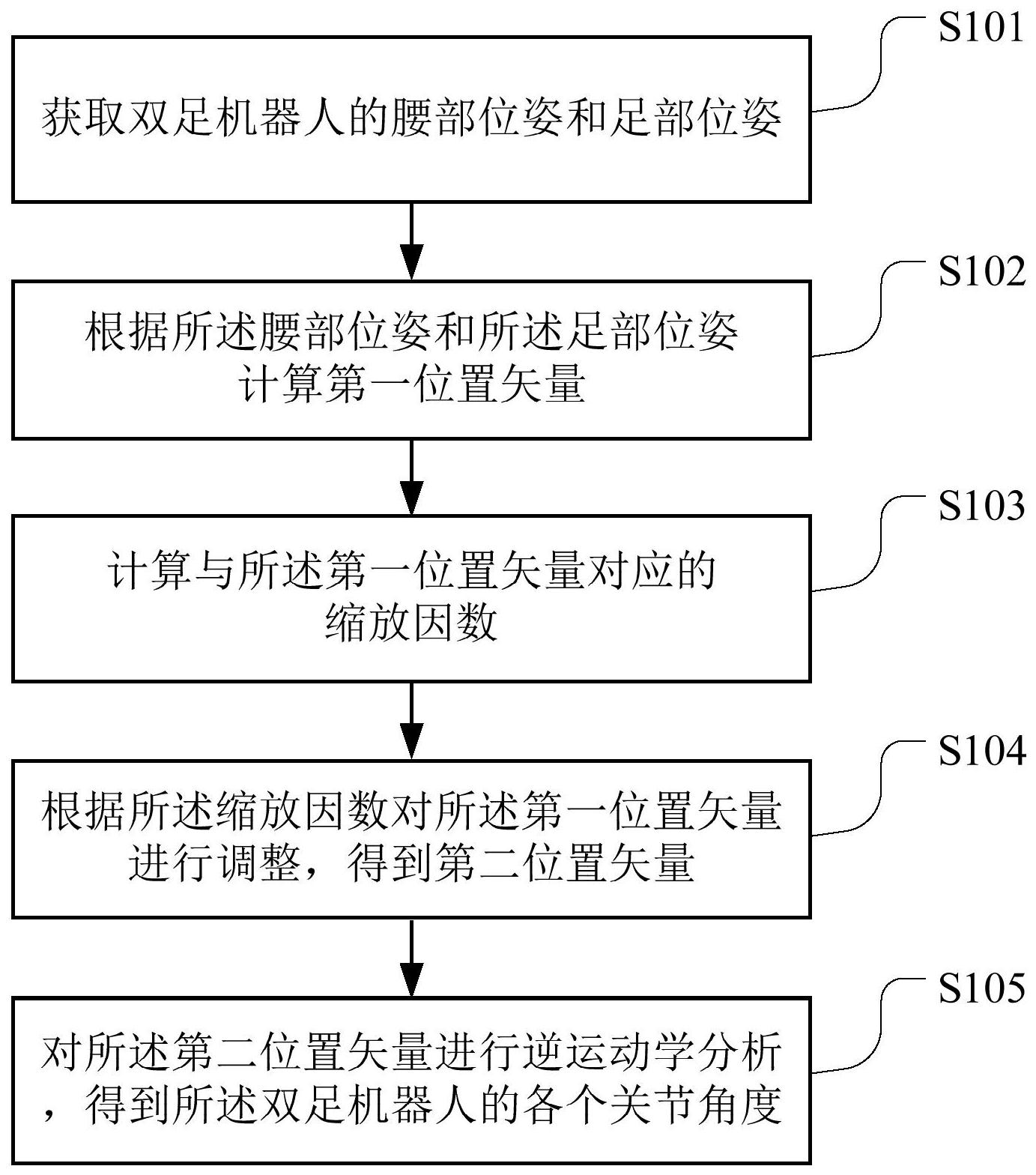
本申请属于计算机技术领域,尤其涉及一种避奇异的步态规划方法、装置、计算机可读存储介质及机器人。所述方法获取双足机器人的腰部位姿和足部位姿;根据所述腰部位姿和所述足部位姿计算第一位置矢量,所述第一位置矢量为在踝关节坐标系中的髋关节位置矢量;计算与所述第一位置矢量对应的缩放因数;若所述缩放因数满足预设的奇异判定条件,则根据所述缩放因数对所述第一位置矢量进行调整,得到第二位置矢量;对所述第二位置矢量进行逆运动学分析,得到所述双足机器人的各个关节角度。通过本申请实施例,在现有技术的基础上,加入了对于奇异问题的考虑,通过对髋关节位置矢量的调整有效规避了可能出现的奇异问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有