

授权公布号:CN210389199U
一种机器人关节减速输出机构
失效
申请
2019-07-05
申请公布
1970-01-01
授权
2020-04-24
预估到期
2029-07-05
| 申请号 | CN201921041361.5 |
| 申请日 | 2019-07-05 |
| 授权公布号 | CN210389199U |
| 授权公告日 | 2020-04-24 |
| 分类号 | B25J9/10;B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 北京康力优蓝机器人科技有限公司 |
| 申请人地址 | 北京市海淀区清河永泰园甲1号建金中心6层610 |
专利法律状态
2023-07-14
专利权的终止
状态信息
未缴年费专利权终止;IPC(主分类):B25J9/10;专利号:ZL2019210413615;申请日:20190705;授权公告日:20200424;终止日期:
2023-07-14
专利权的终止
状态信息
未缴年费专利权终止;IPC(主分类):B25J9/10;申请日:20190705;授权公告日:20200424
2020-04-24
授权
状态信息
授权
摘要
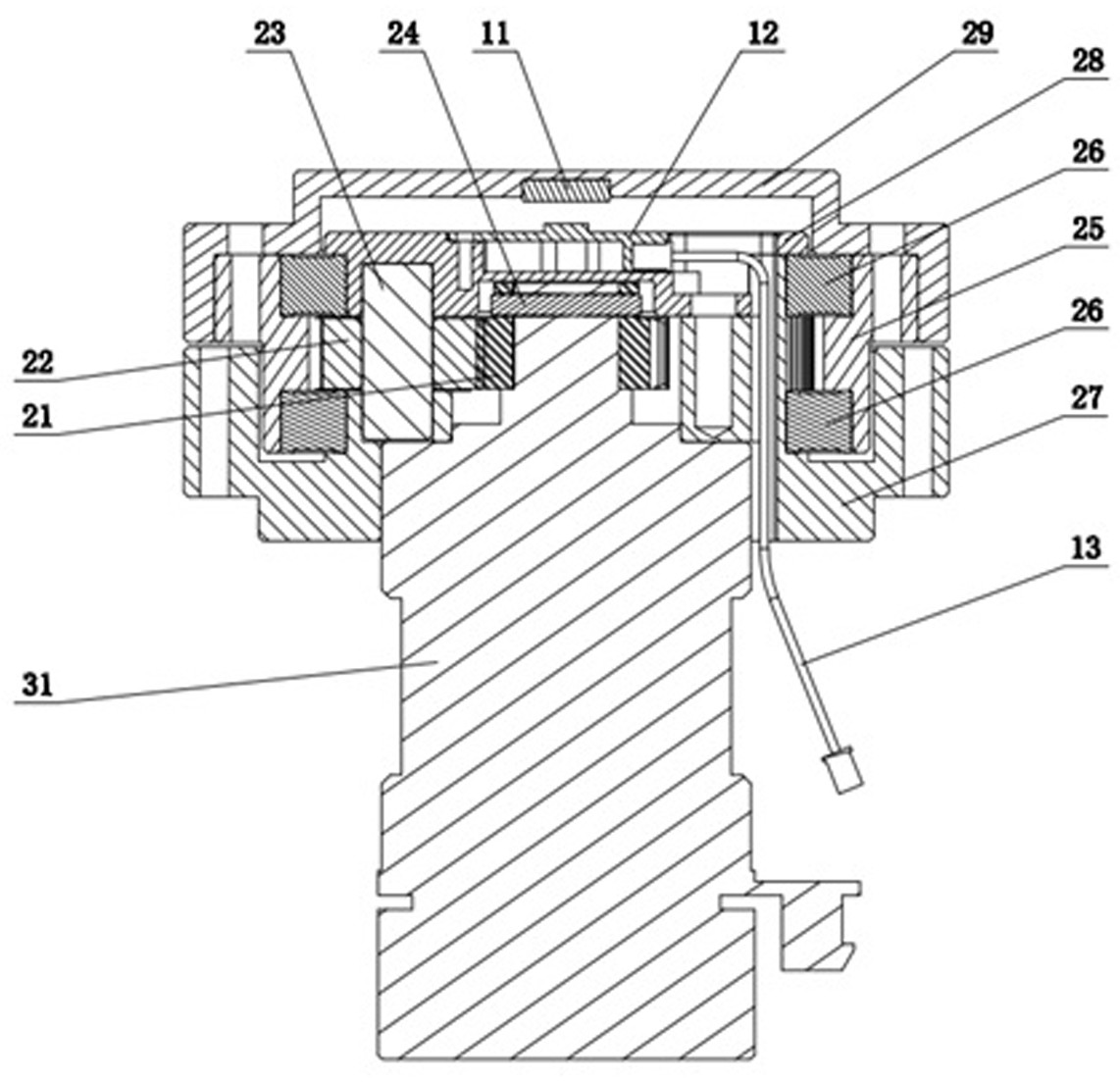
本实用新型属于机器人和人工智能领域,特别是涉及一种机器人关节减速输出机构,包括电机、行星减速器装置和位置反馈装置,行星减速器装置包括太阳齿轮、行星齿轮组、行星轴、销钉、内齿圈、角接触轴承、行星架基座、行星架压盖和输出端法兰盘,位置反馈装置包括磁性元件、磁编码器和信号连接线。其中,电机的电机输出轴与太阳齿轮固定,太阳齿轮带动行星齿轮组转动,实现第一次减速、增大扭矩;行星齿轮组带动内齿圈转动,实现第二次减速、增加扭矩;内齿圈与输出法兰盘固定,输出端法兰盘随内齿圈一同转动。输出端法兰盘安装有磁性元件,磁编码器正对着磁性元件安装于行星架压盖内,实时读取输出端法兰盘的角度位置,配合驱动器实现高精度控制。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有