

授权公布号:CN107598968B
一种服务型机器人末端执行器的力反馈系统及实现方法
失效
申请
2017-08-10
申请公布
1970-01-01
授权
2018-11-23
预估到期
2037-08-10
| 申请号 | CN201710677949.9 |
| 申请日 | 2017-08-10 |
| 申请公布号 | CN107598968A |
| 申请公布日 | - |
| 授权公布号 | CN107598968B |
| 授权公告日 | 2018-11-23 |
| 分类号 | B25J19/00;B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 北京康力优蓝机器人科技有限公司 |
| 申请人地址 | 北京市海淀区清河永泰园甲1号建金中心6层610 |
专利法律状态
2023-08-18
专利权的终止
状态信息
未缴年费专利权终止;IPC(主分类):B25J 19/00;专利号:ZL2017106779499;申请日:20170810;授权公告日:20181123;终止日期:
2018-11-23
授权
状态信息
授权
2018-02-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J19/00;申请日:20170810
摘要
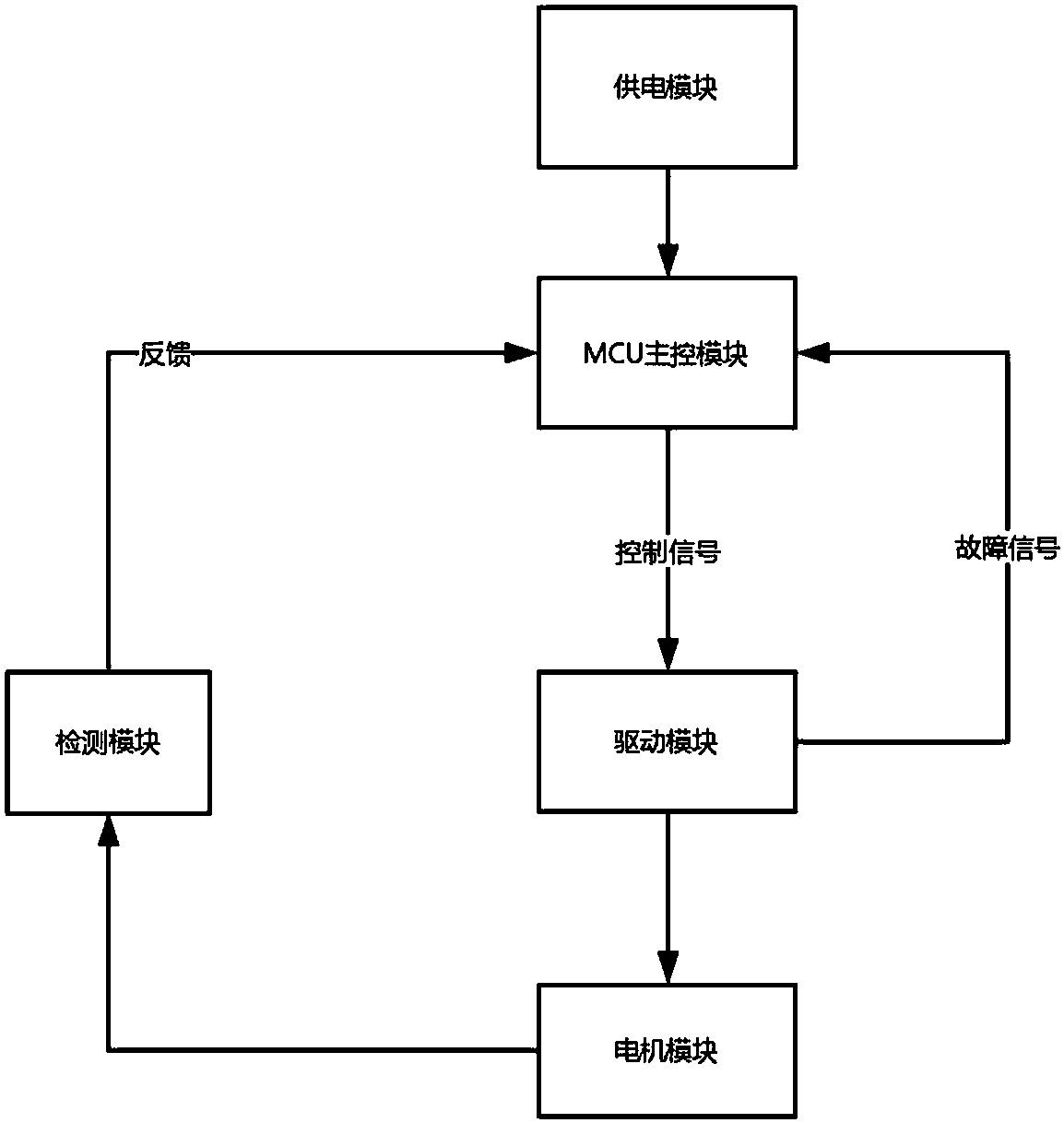
本发明属于服务型机器人和人工智能领域,特别是涉及一种服务型机器人末端执行器的力反馈系统及实现方法。一种服务型机器人末端执行器的力反馈系统,包含供电模块、主控模块、驱动模块、电机模块和检测模块;所述主控模块采用MCU,主要用于控制驱动芯片进行工作、存储检测模块反馈的位置信息及接收驱动芯片故障反馈三个方面的逻辑处理;所述驱动模块包括用于驱动电机工作的处理部分、用于反馈故障信号的反馈机制、用于配置电流检测阈值的电流配置部分及用于配置过流检测时间阈值的时间配置部分;所述检测模块主要用于力反馈系统的自回复机制,使电机运动的所有过程都被检测模块记录,使得机器人末端执行器如人的手臂一样具有记忆性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有