

授权公布号:CN107756449B
服务机器人机械关节处的防夹检测系统
有效
申请
2017-11-10
申请公布
2018-03-06
授权
2020-10-02
预估到期
2037-11-10
| 申请号 | CN201711107893.X |
| 申请日 | 2017-11-10 |
| 申请公布号 | CN107756449A |
| 申请公布日 | 2018-03-06 |
| 授权公布号 | CN107756449B |
| 授权公告日 | 2020-10-02 |
| 分类号 | B25J19/06 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 北京康力优蓝机器人科技有限公司 |
| 申请人地址 | 北京市海淀区中关村东路1号院2号楼4层4N-01室 |
专利法律状态
2023-07-25
专利权的保全及其解除
状态信息
专利权的保全;IPC(主分类):B25J 19/06;专利号:ZL201711107893X;申请日:20171110;授权公告日:20201002;登记生效日:20230704;解除日:
2020-10-02
授权
状态信息
授权
2018-03-30
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J19/06;申请日:20171110
2018-03-06
公布
状态信息
公布
摘要
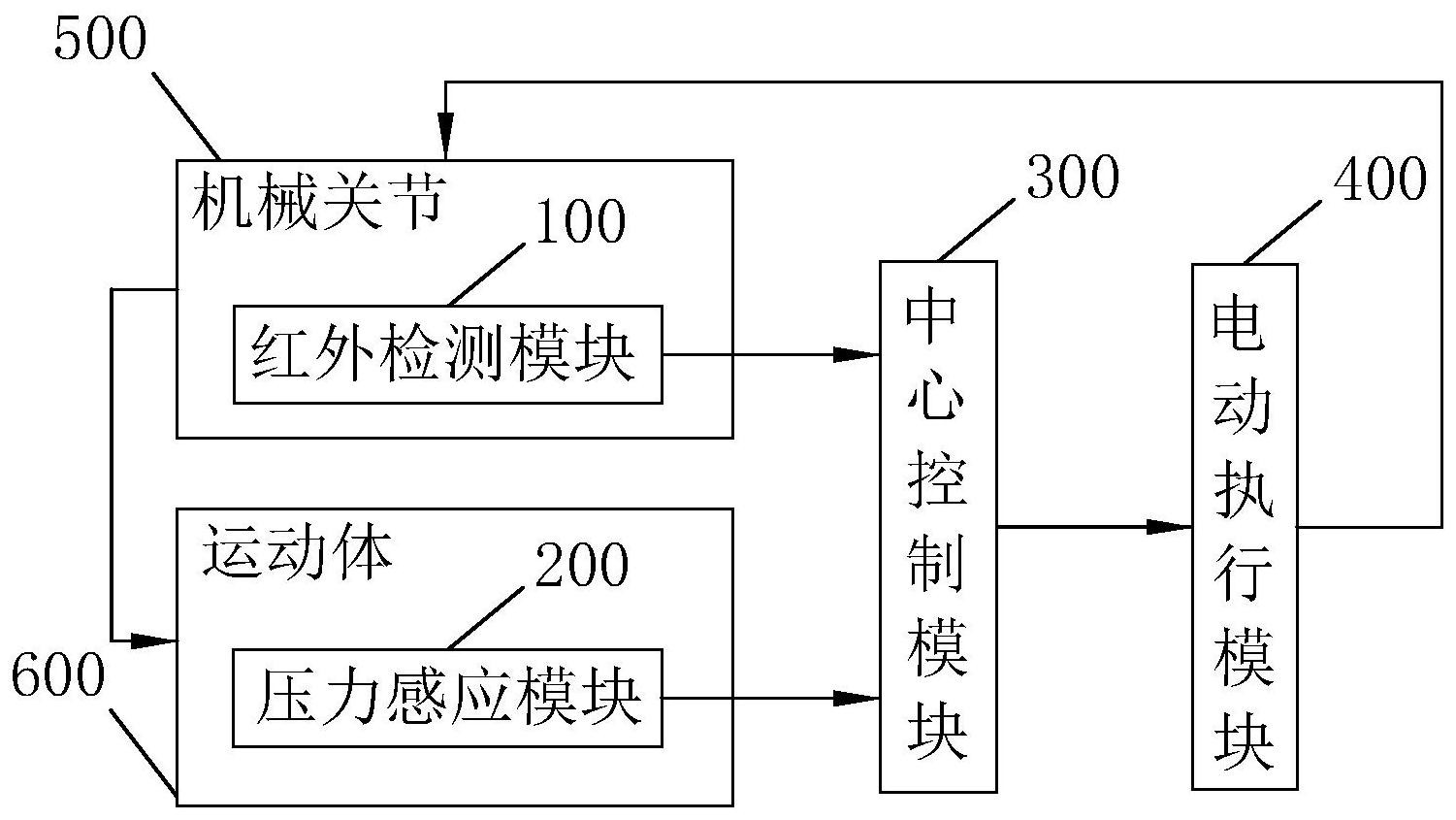
本发明公开了一种服务机器人机械关节处的防夹检测系统,涉及服务机器人领域,能够检测伸入关节处的手指等异物,降低被夹手的风险。本发明的技术方案要点是包括:红外检测模块,其用于检测伸入关节处的手指或异物,并发出第一信号;电动执行模块,其用于驱动所述关节运动;中心控制模块,其用于接收所述第一信号,并控制电动执行模块驱动连接于机械关节两侧的运动体停止/相对反向运动,从而避免手指或异物被机械关节两侧的运动体夹持。本发明主要应用于各类服务机器人中,能够有效解决现有机器人出现的关节处夹手的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有