

授权公布号:CN113721619B
一种基于RTK技术的推土机路径规划系统及作业方法
有效
申请
2021-08-30
申请公布
2021-11-30
授权
2024-03-26
预估到期
2041-08-30
| 申请号 | CN202111004237.3 |
| 申请日 | 2021-08-30 |
| 申请公布号 | CN113721619A |
| 申请公布日 | 2021-11-30 |
| 授权公布号 | CN113721619B |
| 授权公告日 | 2024-03-26 |
| 分类号 | G05D1/43;G01C21/20;G01S19/49;G05D1/633;G05D1/644;G05D1/248;G05D1/247;G05D105/22N |
| 分类 | 控制;调节; |
| 申请人名称 | 山推工程机械股份有限公司 |
| 申请人地址 | 山东省济宁市高新区327国道58号 |
专利法律状态
2024-03-26
授权
状态信息
授权
2021-11-30
公布
状态信息
公布
摘要
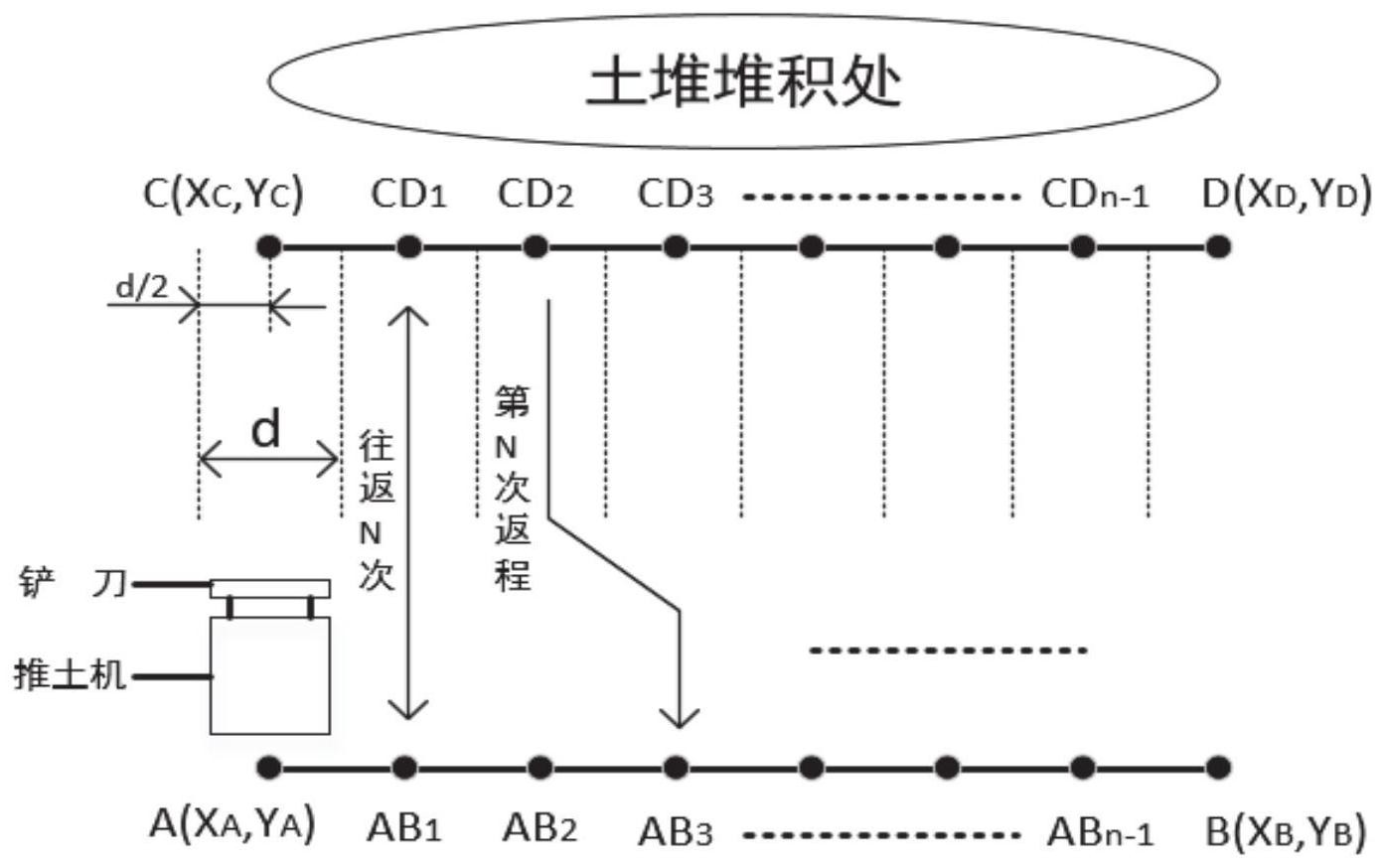
本发明专利公开了一种基于RTK技术的推土机路径规划系统及作业方法,该系统包括GNSS基准站、GNSS移动站、IMU传感器、双目相机、控制器、比例阀组及人机交互界面。该方法及系统应用在无人驾驶推土机的整平作业中,所有传感器与控制器进行数据通讯,控制器通过比例阀控制液压马达工作进而实现行走机构的自动化,GNSS移动站安装在推土机上并实时接收基站发射的信号进行差分定位,采用纯跟踪算法使推土机按照规划好的路径点和路径移动,IMU传感器用于路径跟踪过程中的方向纠偏,人机交互界面通过网络传输系统发送控制指令实现远程控制,双目相机用于实时检测障碍物目标的深度信息,提高系统的安全性与稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有