

授权公布号:CN113483682B
一种基于机器视觉的缝隙测量方法及系统
有效
申请
2021-06-16
申请公布
2021-10-08
授权
2023-05-19
预估到期
2041-06-16
| 申请号 | CN202110665075.1 |
| 申请日 | 2021-06-16 |
| 申请公布号 | CN113483682A |
| 申请公布日 | 2021-10-08 |
| 授权公布号 | CN113483682B |
| 授权公告日 | 2023-05-19 |
| 分类号 | G01B11/14;G01B11/02 |
| 分类 | 测量;测试; |
| 申请人名称 | 苏州赛腾精密电子股份有限公司 |
| 申请人地址 | 江苏省苏州市吴中经济开发区东吴南路4号 |
专利法律状态
2023-05-19
授权
状态信息
授权
2021-10-26
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01B11/14;申请日:20210616
2021-10-08
公布
状态信息
公布
摘要
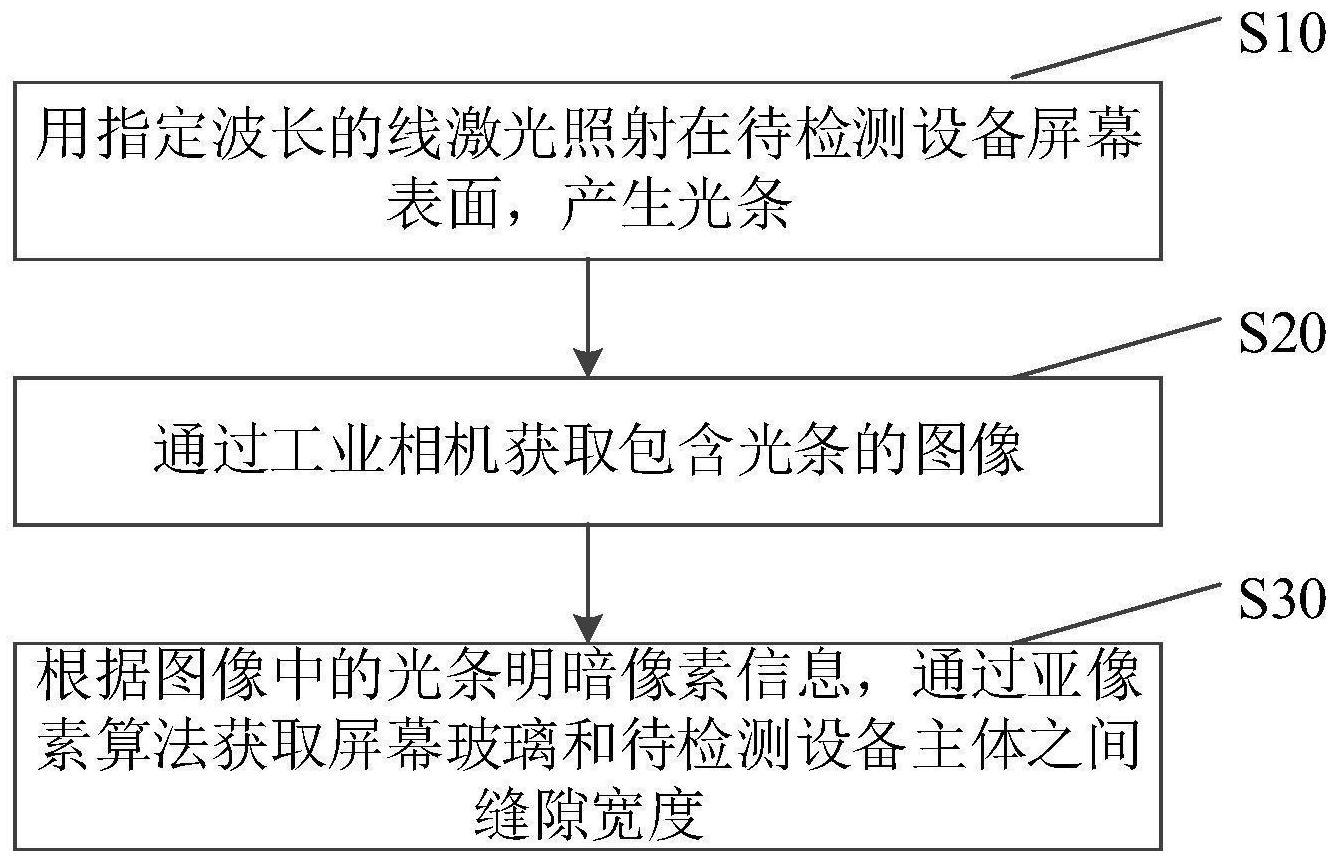
本发明公开了一种基于机器视觉的缝隙测量方法及系统,其中方法包括:用指定波长的线激光照射在待检测设备屏幕表面,产生光条;其中,光条由屏幕玻璃表面的反射光、待检测设备主体上的漫反射光以及由屏幕玻璃和待检测设备主体之间缝隙产生的暗部组成;通过工业相机获取包含光条的图像;根据图像中的光条明暗像素信息,通过亚像素算法获取屏幕玻璃和待检测设备主体之间缝隙宽度。图像采集和分析时使用亚像素分析技术,能更精准的测量出屏幕缝隙的大小,提高产品质量。相较于现阶段人工测量存在的干扰以及精度问题,通过采用计算机视觉处理方法,由于计算机视觉的方法具有速度快、非接触、精度较高等特点,满足了精益求精、与时俱进的生产要求。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有