

授权公布号:CN111015701B
机械手
有效
申请
2019-12-13
申请公布
2020-04-17
授权
2024-02-23
预估到期
2039-12-13
| 申请号 | CN201911284326.0 |
| 申请日 | 2019-12-13 |
| 申请公布号 | CN111015701A |
| 申请公布日 | 2020-04-17 |
| 授权公布号 | CN111015701B |
| 授权公告日 | 2024-02-23 |
| 分类号 | B25J15/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 无锡先导智能装备股份有限公司 |
| 申请人地址 | 江苏省无锡市国家高新技术产业开发区新锡路20号 |
专利法律状态
2024-02-23
授权
状态信息
授权
2020-05-12
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J15/00;申请日:20191213
2020-04-17
公布
状态信息
公布
摘要
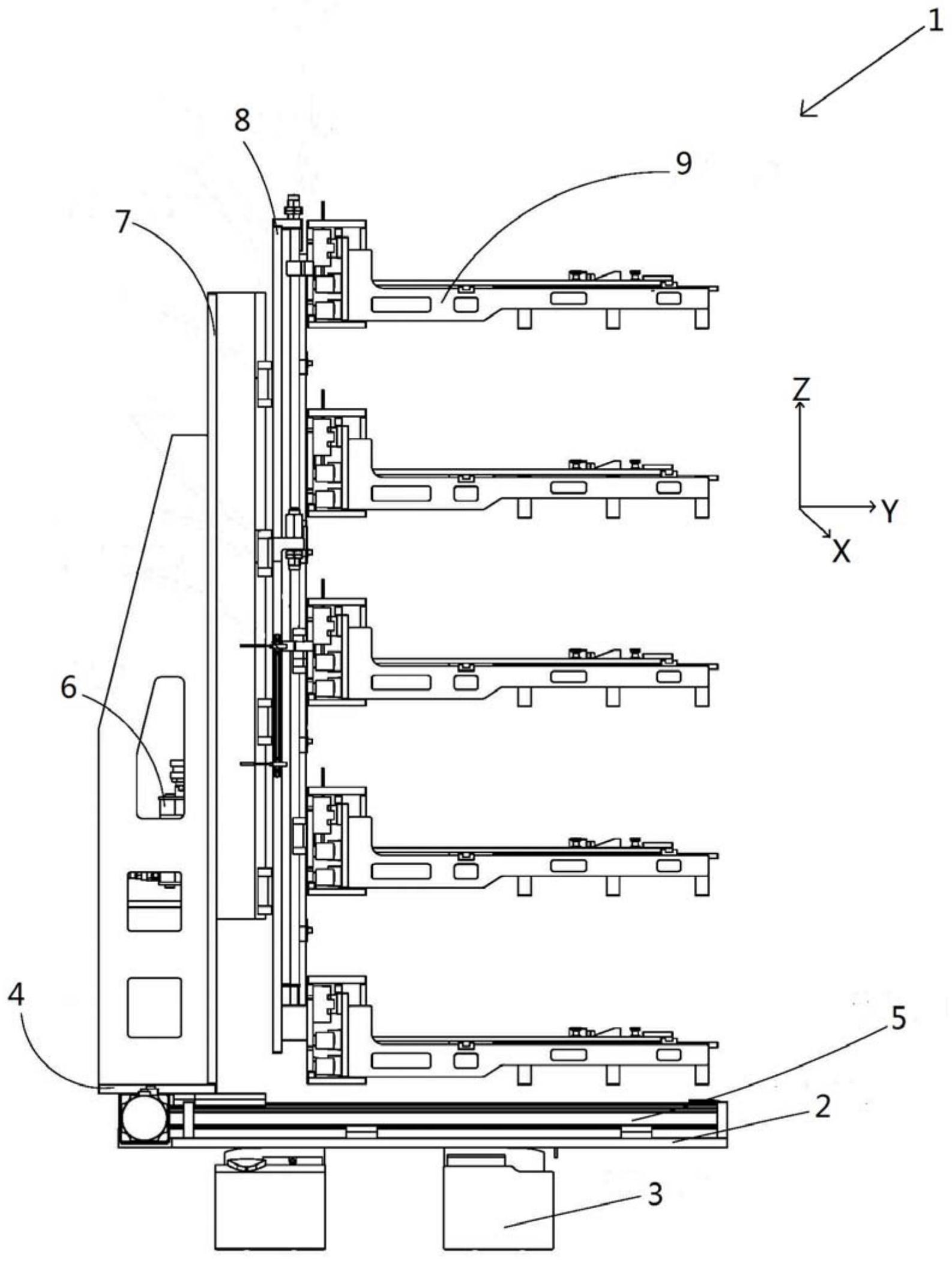
本申请提供了一种机械手,包括固定底板在第一驱动机构的驱动下沿着第一方向往复运动,活动底板活动设置在固定底板上,活动底板在第二驱动机构的驱动下沿着第二方向往复运动,承载装置设置在活动底板上,承载装置包括第三驱动机构、固定立板和活动立板,夹持装置设置在活动立板远离固定立板的一面,第三驱动机构驱动活动立板带动夹持装置在第三方向往复运动,夹持装置包括变距装置和至少一个夹抓组件,夹抓组件在变距装置的驱动下移动;夹抓组件用于夹抓电芯,该夹抓组件可以在三个不同的方向上运动而且各个夹抓组件之间的距离可控,所以该机械手解决搬运机构无法同时快速地将所有电芯从中转工位搬运到热压设备进行处理的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有