

授权公布号:CN111780744B
移动机器人混合导航方法、设备及存储装置
有效
申请
2020-06-24
申请公布
2020-10-16
授权
2023-12-29
预估到期
2040-06-24
| 申请号 | CN202010592745.7 |
| 申请日 | 2020-06-24 |
| 申请公布号 | CN111780744A |
| 申请公布日 | 2020-10-16 |
| 授权公布号 | CN111780744B |
| 授权公告日 | 2023-12-29 |
| 分类号 | G01C21/00;G01C21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 浙江华睿科技股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区滨安路1181号A幢8层 |
专利法律状态
2023-12-29
授权
状态信息
授权
2021-08-13
著录事项变更
状态信息
著录事项变更;IPC(主分类):G01C21/00;变更事项:申请人;变更前:浙江华睿科技有限公司;变更后:浙江华睿科技股份有限公司;变更事项:地址;变更前:310051 浙江省杭州市滨江区滨安路1199号C10;变更后:310051 浙江省杭州市滨江区滨安路1181号A幢8层
2021-01-12
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):G01C21/00;登记生效日:20201230;变更事项:申请人;变更前:浙江大华技术股份有限公司;变更后:浙江华睿科技有限公司;变更事项:地址;变更前:310051 浙江省杭州市滨江区滨安路1187号;变更后:310051 浙江省杭州市滨江区滨安路1199号C10
2020-11-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/00;申请日:20200624
2020-10-16
公布
状态信息
公布
摘要
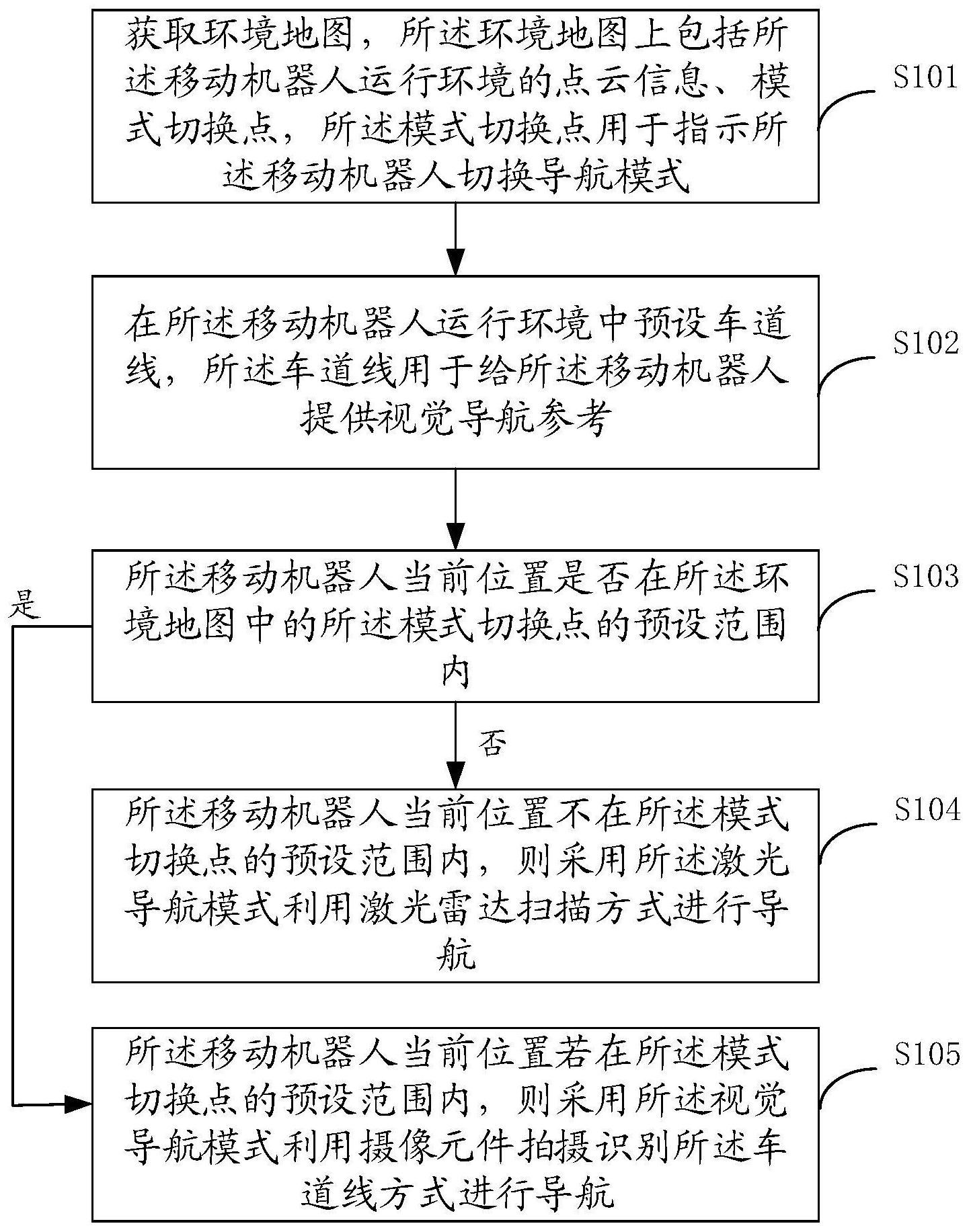
本发明公开了一种移动机器人混合导航方法、设备及存储装置,所述移动机器人混合导航方法包括获取环境地图,在所述移动机器人运行环境中预设车道线,所述移动机器人当前位置是否在所述环境地图中的所述模式切换点的预设范围内;若判断不在所述模式切换点的预设范围内,则采用所述激光导航模式利用激光雷达扫描方式进行导航,若判断在所述模式切换点的预设范围内,则采用所述视觉导航模式利用摄像元件拍摄识别所述车道线方式进行导航。通过上述方式,本发明能够达到适应多种导航环境,特别是在上下坡、长走廊及夜间导航环境下仍能精确导航的目的。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有