

授权公布号:CN110654192B
轮体减震装置及自动引导运输车
有效
申请
2019-08-23
申请公布
2020-01-07
授权
2024-01-05
预估到期
2039-08-23
| 申请号 | CN201910784515.8 |
| 申请日 | 2019-08-23 |
| 申请公布号 | CN110654192A |
| 申请公布日 | 2020-01-07 |
| 授权公布号 | CN110654192B |
| 授权公告日 | 2024-01-05 |
| 分类号 | B60G13/04 |
| 分类 | 一般车辆; |
| 申请人名称 | 浙江华睿科技股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区滨安路1181号A幢8层 |
专利法律状态
2024-01-05
授权
状态信息
授权
2021-08-03
著录事项变更
状态信息
著录事项变更;IPC(主分类):B60G13/04;变更事项:申请人;变更前:浙江华睿科技有限公司;变更后:浙江华睿科技股份有限公司;变更事项:地址;变更前:310051 浙江省杭州市滨江区滨安路1199号C10;变更后:310051 浙江省杭州市滨江区滨安路1181号A幢8层
2020-12-29
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B60G13/04;登记生效日:20201217;变更事项:申请人;变更前:浙江大华机器人技术有限公司;变更后:浙江华睿科技有限公司;变更事项:地址;变更前:311200 浙江省杭州市萧山区宁围街道新宁路176号;变更后:310051 浙江省杭州市滨江区滨安路1199号C10
2020-02-04
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60G13/04;申请日:20190823
2020-01-07
公布
状态信息
公布
摘要
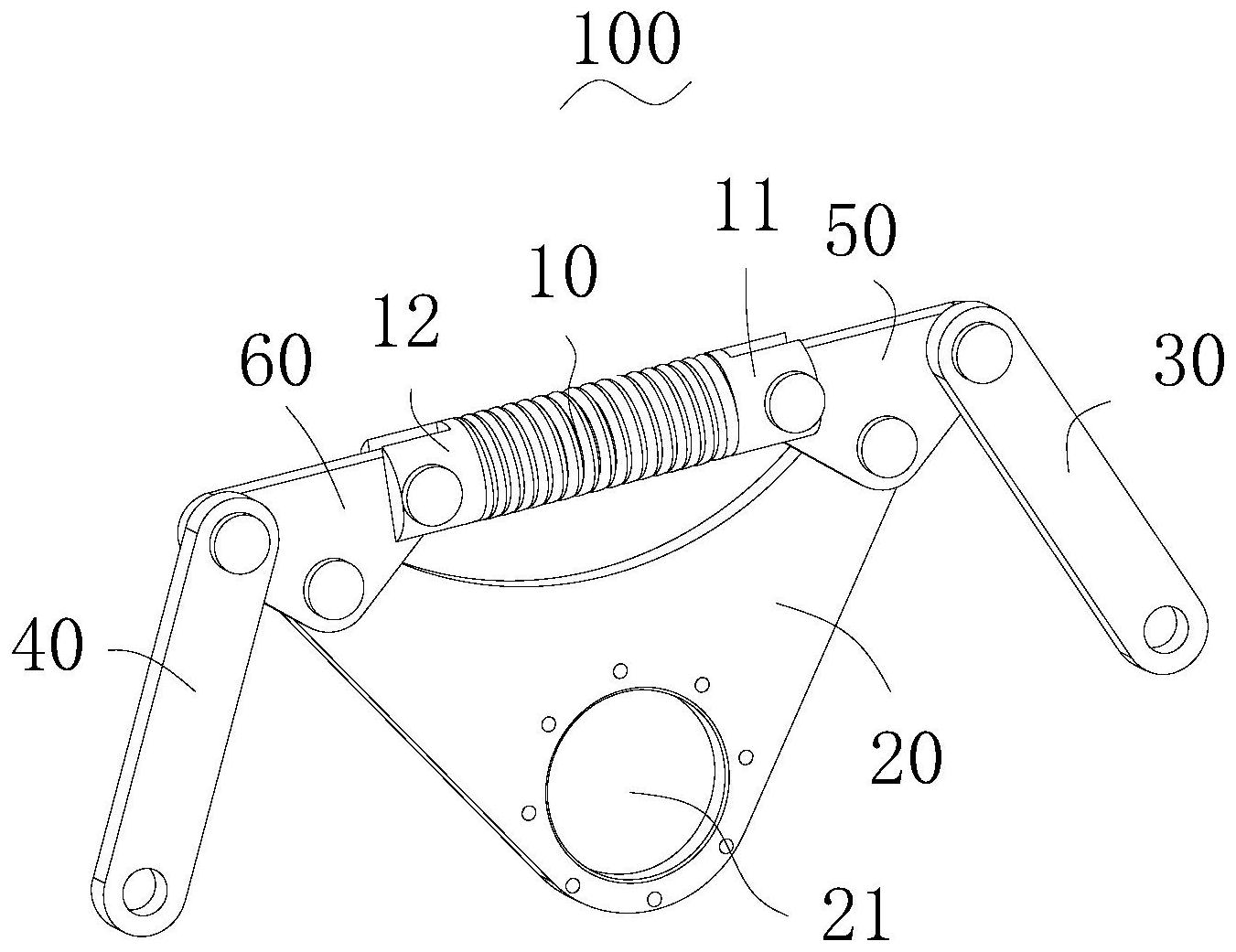
本发明提供一种轮体减震装置,包括固定板、第一连杆、第二连杆及弹性件,所述固定板连接于外部的轮体并铰接于所述第一连杆及第二连杆,所述第一连杆及第二连杆分别设置于所述外部的轮体的两侧,所述第一连杆与第二连杆的两端均分别铰接于所述弹性件与外部车体;所述弹性件沿所述轮体的行进方向设置。本发明提供的轮体减震装置通过连杆结构将减震弹簧沿轮体的行进方向设置,使AGV在正向和反向行走时轮体减震结构中弹簧的受力情况一致,确保AGV正向行走和反向行走具有均衡的越障能力。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有