

授权公布号:CN113673288B
空闲车位检测方法、装置、计算机设备及存储介质
有效
申请
2020-05-15
申请公布
2021-11-19
授权
2024-01-23
预估到期
2040-05-15
| 申请号 | CN202010412619.9 |
| 申请日 | 2020-05-15 |
| 申请公布号 | CN113673288A |
| 申请公布日 | 2021-11-19 |
| 授权公布号 | CN113673288B |
| 授权公告日 | 2024-01-23 |
| 分类号 | G06V20/58;G06V10/25;G06V10/46;G06V10/75;G06V10/762;G06V10/10;G06T3/4038;G06T7/80 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳市航盛电子股份有限公司 |
| 申请人地址 | 广东省深圳市宝安区福永镇福园一路航盛工业园 |
专利法律状态
2024-01-23
授权
状态信息
授权
2021-12-07
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20200515
2021-11-19
公布
状态信息
公布
摘要
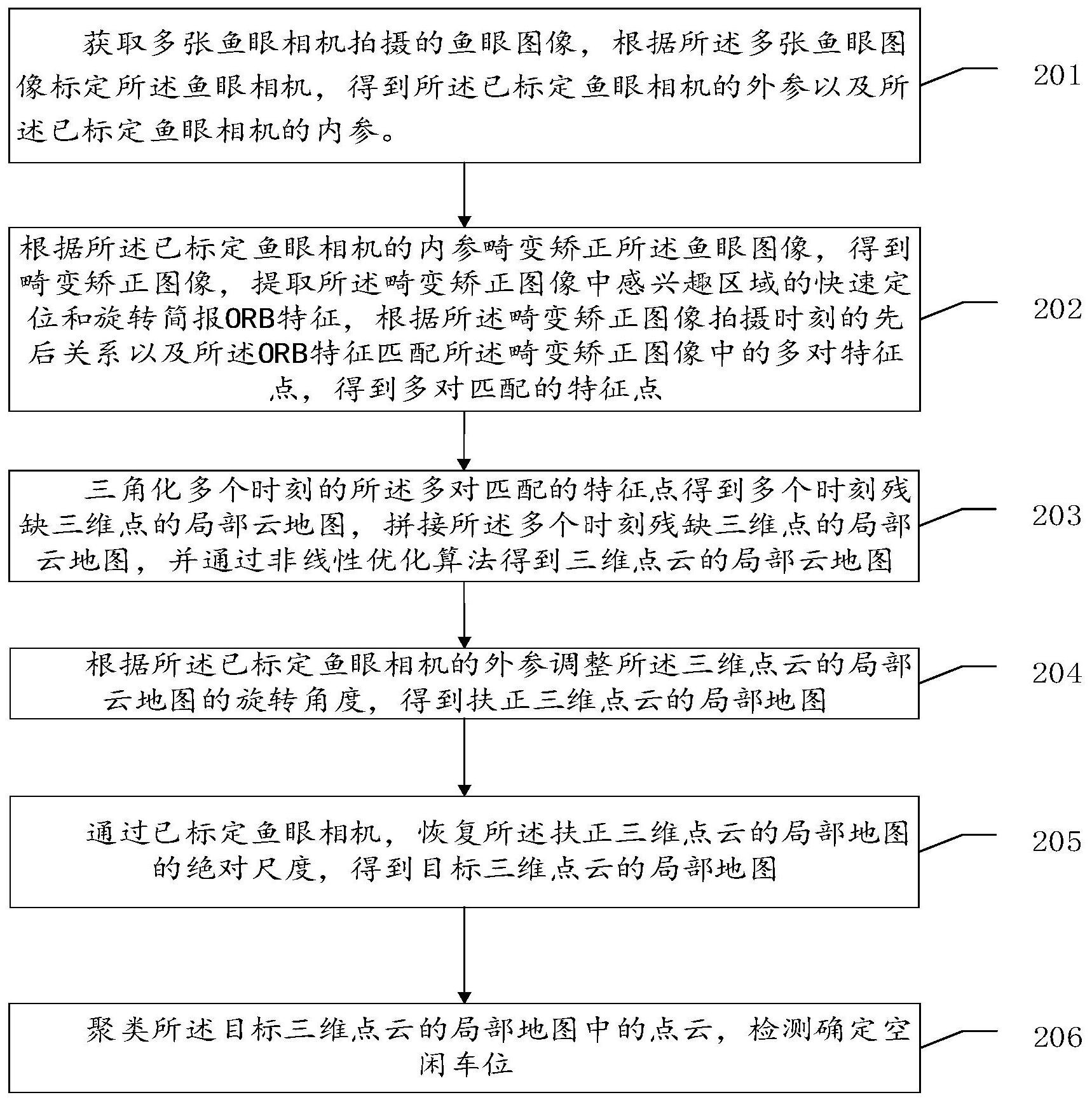
本申请实施例属于智能停车领域,涉及一种空闲车位检测方法,包括标定鱼眼相机,得到已标定鱼眼相机的外参以及的内参;通过内参得到多对匹配的特征点;三角化多个时刻的多对匹配的特征点得到多个时刻残缺三维点的局部云地图,进行拼接后,通过非线性优化算法得到三维点云的局部云地图;根据外参调整三维点云的局部云地图的旋转角度,得到扶正三维点云的局部地图;通过已标定鱼眼相机,恢复扶正三维点云的局部地图的绝对尺度,得到目标三维点云的局部地图;聚类目标三维点云的局部地图中的点云,检测确定空闲车位。本申请还提供一种空闲车位检测装置、计算机设备及存储介质。本申请提高找到停车位置的稳定性和准确性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有