

授权公布号:CN114055464B
一种智能调度机械手工作的执行系统及其工作方法
有效
申请
2021-09-30
申请公布
2022-02-18
授权
2024-01-19
预估到期
2041-09-30
| 申请号 | CN202111160795.9 |
| 申请日 | 2021-09-30 |
| 申请公布号 | CN114055464A |
| 申请公布日 | 2022-02-18 |
| 授权公布号 | CN114055464B |
| 授权公告日 | 2024-01-19 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳市航盛电子股份有限公司 |
| 申请人地址 | 广东省深圳市宝安区福海街道展城社区福园一路航盛工业园A1栋办公楼201 |
专利法律状态
2024-01-19
授权
状态信息
授权
2022-05-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20210930
2022-02-18
公布
状态信息
公布
摘要
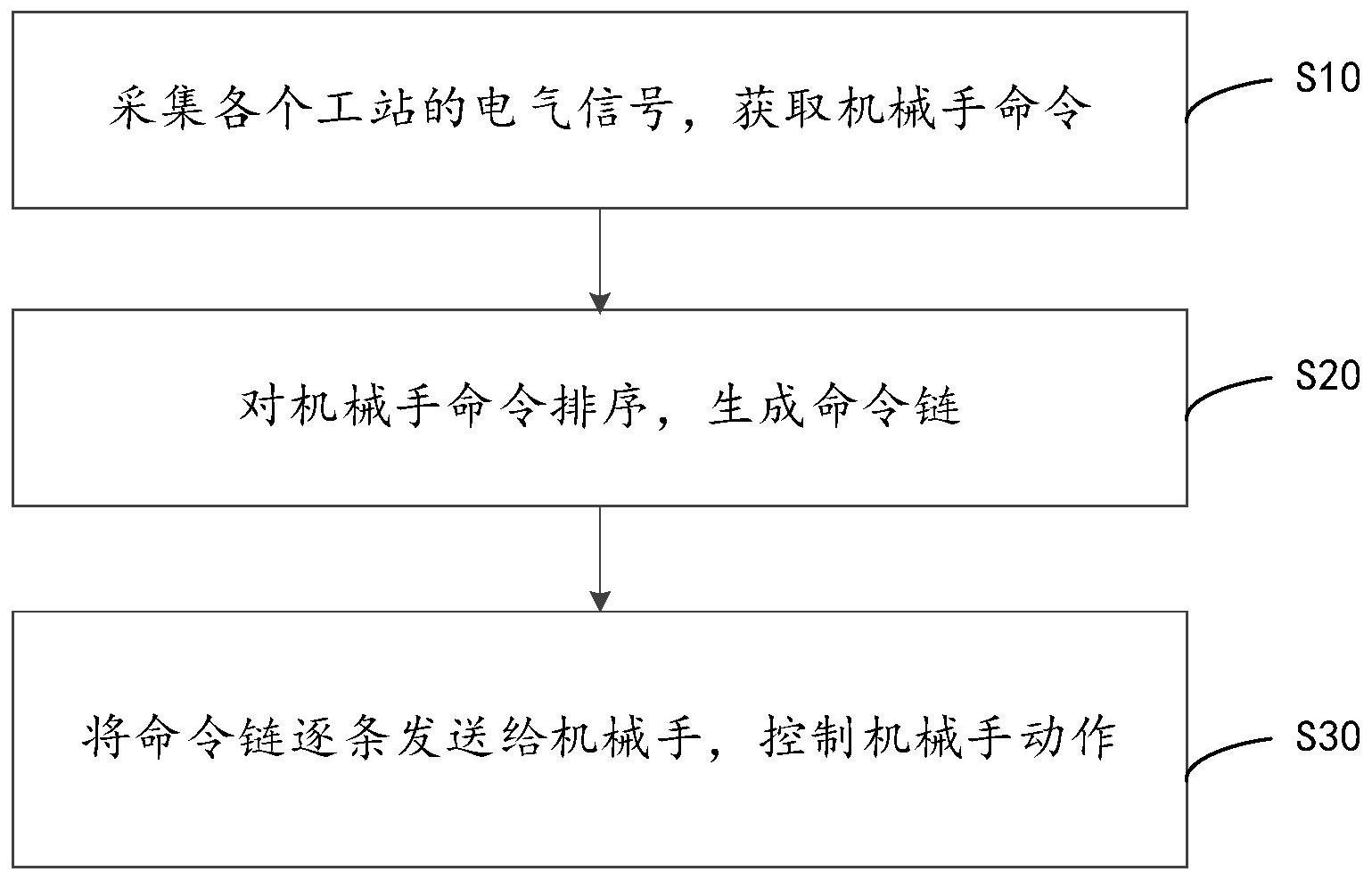
本申请实施例属于车载显示屏生产技术领域,涉及一种智能调度机械手工作的执行系统及其工作方法。所述工作方法包括以下步骤:采集各个工站的电气信号,获取机械手命令;对机械手命令排序,生成控制机械手活动的命令链;将命令链逐条发送给机械手,控制机械手动作。根据命令链控制机械手搬运产品,避免作业员直接搬运,提高生产质量,减少作业员疲劳度;采用机械手命令链的形式,可充分利用双爪或多爪机械手的优势,可减少搬运时间,提升效率;机械手工作路径由中控平台结合实际电气信号实时更新,具备更好的柔性和适应性,可以实现传统生产线难以实现的跳工站和逆工站的行为。工站内部采用上下分层的并行结构化设计,可节省生产时间,提高效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有