

授权公布号:CN207924470U
一种数控辗环机抱臂伺服控制系统
有效
申请
2018-02-07
申请公布
1970-01-01
授权
2018-09-28
预估到期
2028-02-07
| 申请号 | CN201820209889.8 |
| 申请日 | 2018-02-07 |
| 授权公布号 | CN207924470U |
| 授权公告日 | 2018-09-28 |
| 分类号 | G05B19/05;B21H1/06 |
| 分类 | 控制;调节; |
| 申请人名称 | 山西金瑞高压环件有限公司 |
| 申请人地址 | 山西省忻州市定襄县晋昌镇南西力村 |
专利法律状态
2018-09-28
授权
状态信息
授权
摘要
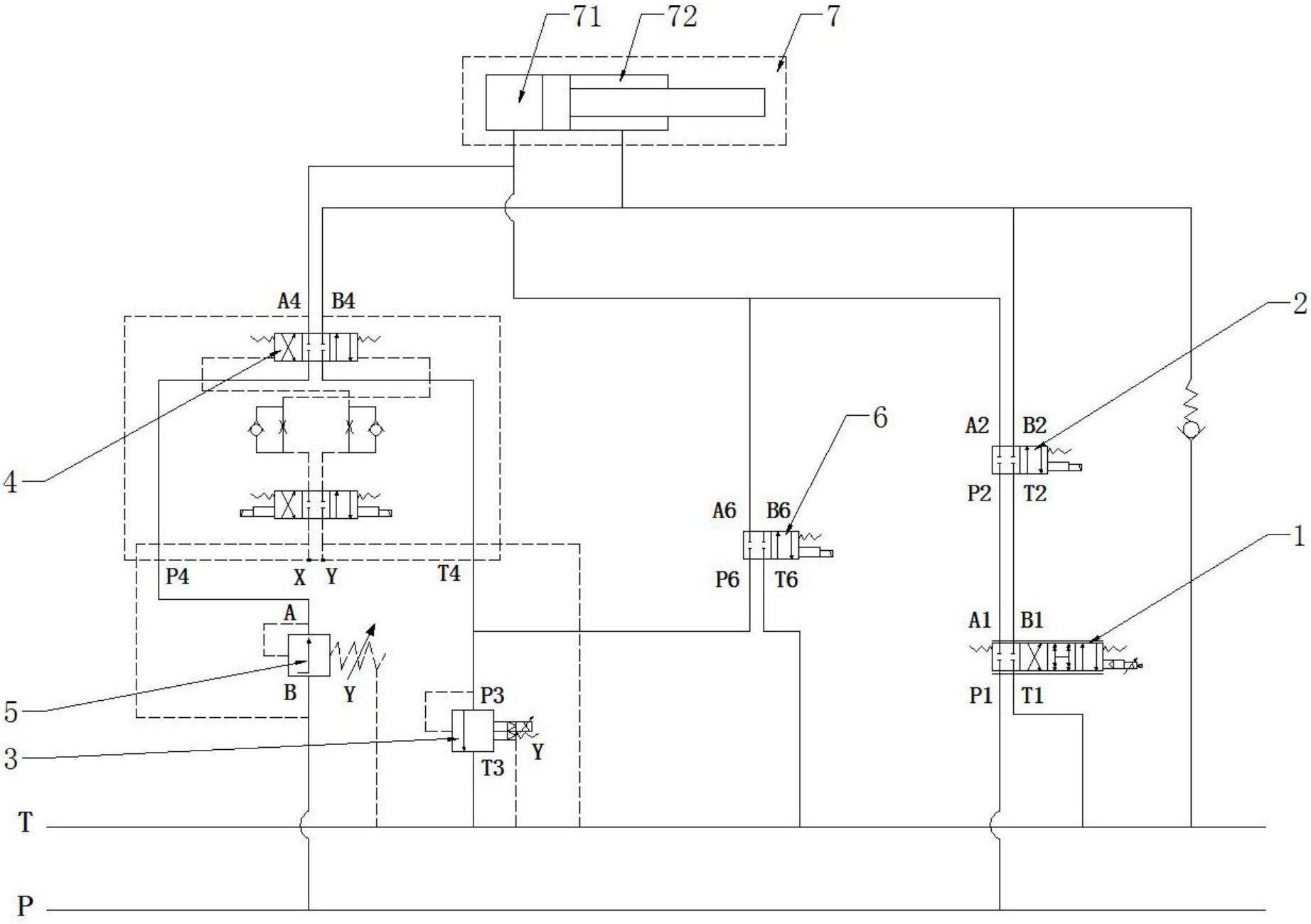
一种数控辗环机抱臂伺服控制系统,属于卧式径轴向辗环设备控制装置技术领域,解决辗环机整圆困难的技术问题,本系统包括电磁换向阀、比例溢流阀、减压阀以及PLC控制器,电磁换向阀包括四位四通伺服电磁换向阀、6通径二位四通电磁换向阀、三位四通先导式电磁换向阀、10通径二位四通电磁换向阀以及用于控制抱臂位置的抱臂控制油缸,抱臂控制油缸包括大腔室与小腔室,抱臂控制油缸中设置的活塞杆贯穿小腔室与抱臂铰接,活塞杆上安装有位置传感器,位置传感器通过信号线与PLC控制器电气连接,液压控制系统控制活塞杆的位置。本实用新型用带位置传感器的油缸代替抱臂的同步齿轮,通过液压控制系统实现抱臂位置精确控制,保证碾环机轧制后环件的椭圆度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有