

授权公布号:CN115184896B
一种基于雷达目标幅度加权均值滤波跟踪处理方法及系统
有效
申请
2022-09-09
申请公布
2022-10-14
授权
2022-11-29
预估到期
2042-09-09
| 申请号 | CN202211098836.0 |
| 申请日 | 2022-09-09 |
| 申请公布号 | CN115184896A |
| 申请公布日 | 2022-10-14 |
| 授权公布号 | CN115184896B |
| 授权公告日 | 2022-11-29 |
| 分类号 | G01S7/41;G01S13/66 |
| 分类 | 测量;测试; |
| 申请人名称 | 北京海兰信数据科技股份有限公司 |
| 申请人地址 | 北京市海淀区地锦路7号院10号楼5层501 |
专利法律状态
2022-11-29
授权
状态信息
授权
2022-10-14
公布
状态信息
公布
摘要
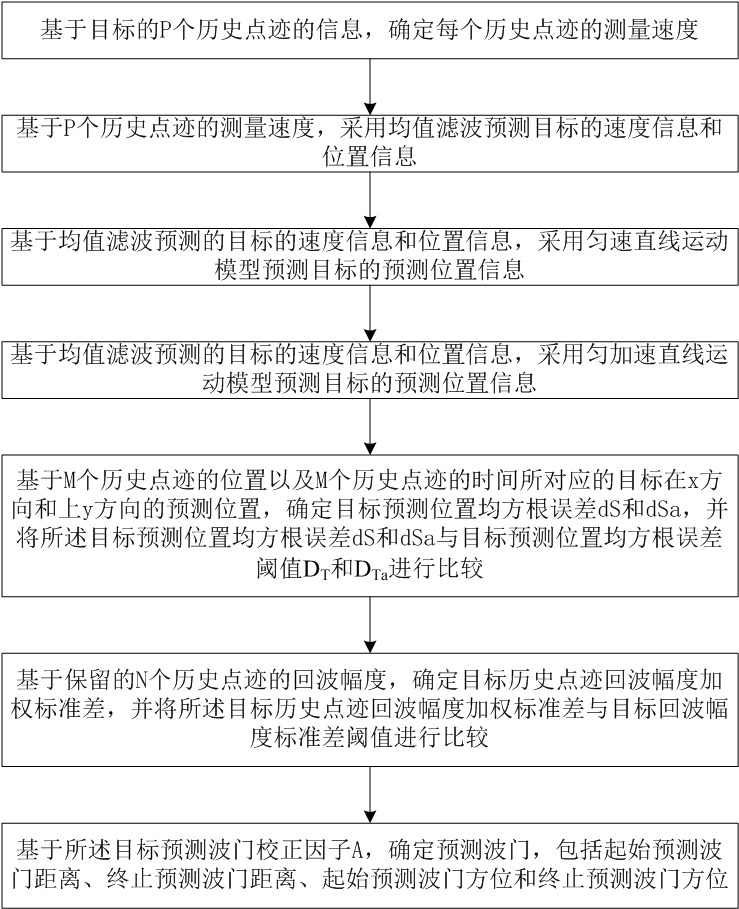
本发明实施例公开了一种基于雷达目标幅度加权均值滤波跟踪处理方法,包括:确定每个历史点迹的测量速度;采用均值滤波预测目标的速度信息和位置信息;采用匀速直线运动模型和匀加速直线运动模型预测目标的预测位置信息;确定目标预测位置均方根误差,并与目标预测位置均方根误差阈值进行比较;确定目标历史点迹回波幅度加权标准差,并与目标回波幅度标准差阈值进行比较;基于所述目标预测波门校正因子,确定预测波门。本发明实施例还公开了一种基于雷达目标幅度加权均值滤波跟踪处理系统。本发明目标统计关联点迹进行幅度信息并计算回波幅度加权标准差,利用标准差值加权滤波结果,从而自适应校正滤波值,提高目标跟踪稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有