

授权公布号:CN113538723B
一种巡检机器人及巡检方法
有效
申请
2021-05-31
申请公布
2021-10-22
授权
2023-04-18
预估到期
2041-05-31
| 申请号 | CN202110600228.4 |
| 申请日 | 2021-05-31 |
| 申请公布号 | CN113538723A |
| 申请公布日 | 2021-10-22 |
| 授权公布号 | CN113538723B |
| 授权公告日 | 2023-04-18 |
| 分类号 | H04N7/18;H04N23/61;H04N23/66;H04N23/695;F16M11/24;F16M11/42 |
| 分类 | 核算装置; |
| 申请人名称 | 优刻得科技股份有限公司 |
| 申请人地址 | 上海市杨浦区隆昌路619号10#楼B座 |
专利法律状态
2023-04-18
授权
状态信息
授权
2021-10-22
公布
状态信息
公布
摘要
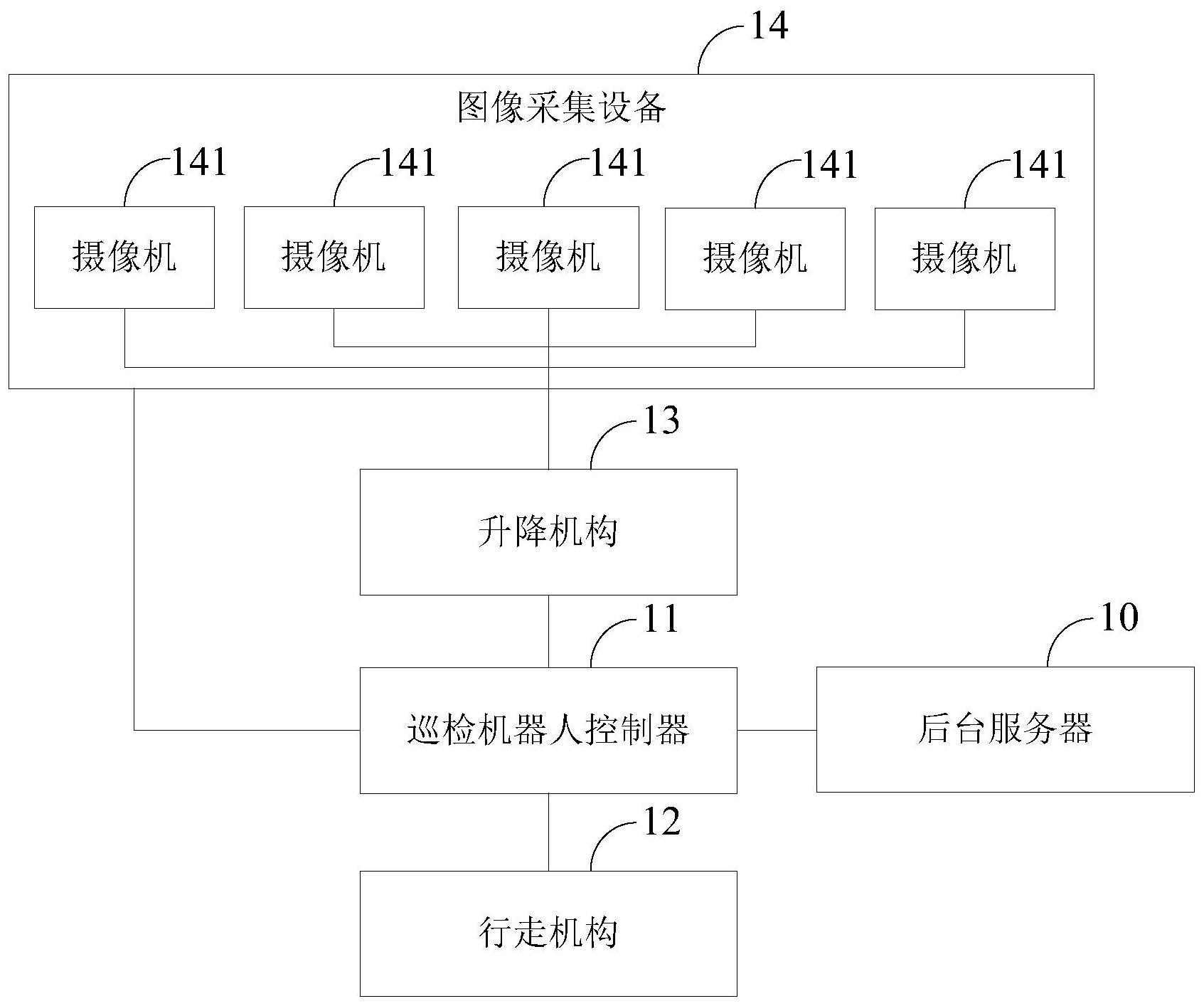
本发明公开了一种巡检机器人及巡检方法,巡检机器人包括机器人控制器、行走机构、升降机构和图像采集设备,机器人控制器接收后台服务器发送的巡检指令,基于巡检指令控制图像采集设备中的各台摄像机在巡检机器人巡检过程中采集包含被监控设备不同区域的视频图像,从所有的摄像机在相同时间段采集的视频图像中,截取同一时刻不同摄像机采集的多张目标图像合成得到合成图像,采用基于深度学习的图像识别方法,从合成图像中识别出故障指示灯。本发明通过在巡检机器人上安装多个摄像头实现对设备不同区域的视频图像的采集,采用图像识别方法识别故障指示灯来及时发现出现故障的设备,从而解放了人力,提高了巡检效率及巡检结果的可靠性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有