

授权公布号:CN105253243B
一种智能爬坡控制系统、电动车及其方法
有效
申请
2015-10-29
申请公布
2016-01-20
授权
2019-07-16
预估到期
2035-10-29
| 申请号 | CN201510726200.X |
| 申请日 | 2015-10-29 |
| 申请公布号 | CN105253243A |
| 申请公布日 | 2016-01-20 |
| 授权公布号 | CN105253243B |
| 授权公告日 | 2019-07-16 |
| 分类号 | B62M6/45;B60L15/20 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 爱玛科技集团股份有限公司 |
| 申请人地址 | 天津市静海县静海经济开发区南区爱玛路5号 |
专利法律状态
2019-07-16
授权
状态信息
授权
2016-02-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62M6/45;申请日:20151029
2016-01-27
著录事项变更
状态信息
著录事项变更;IPC(主分类):B62M6/45;变更事项:申请人;变更前:爱玛科技股份有限公司;变更后:爱玛科技集团股份有限公司;变更事项:地址;变更前:301600 天津市静海县静海经济开发区南区爱玛路5号;变更后:301600 天津市静海县静海经济开发区南区爱玛路5号
2016-01-20
公布
状态信息
公布
摘要
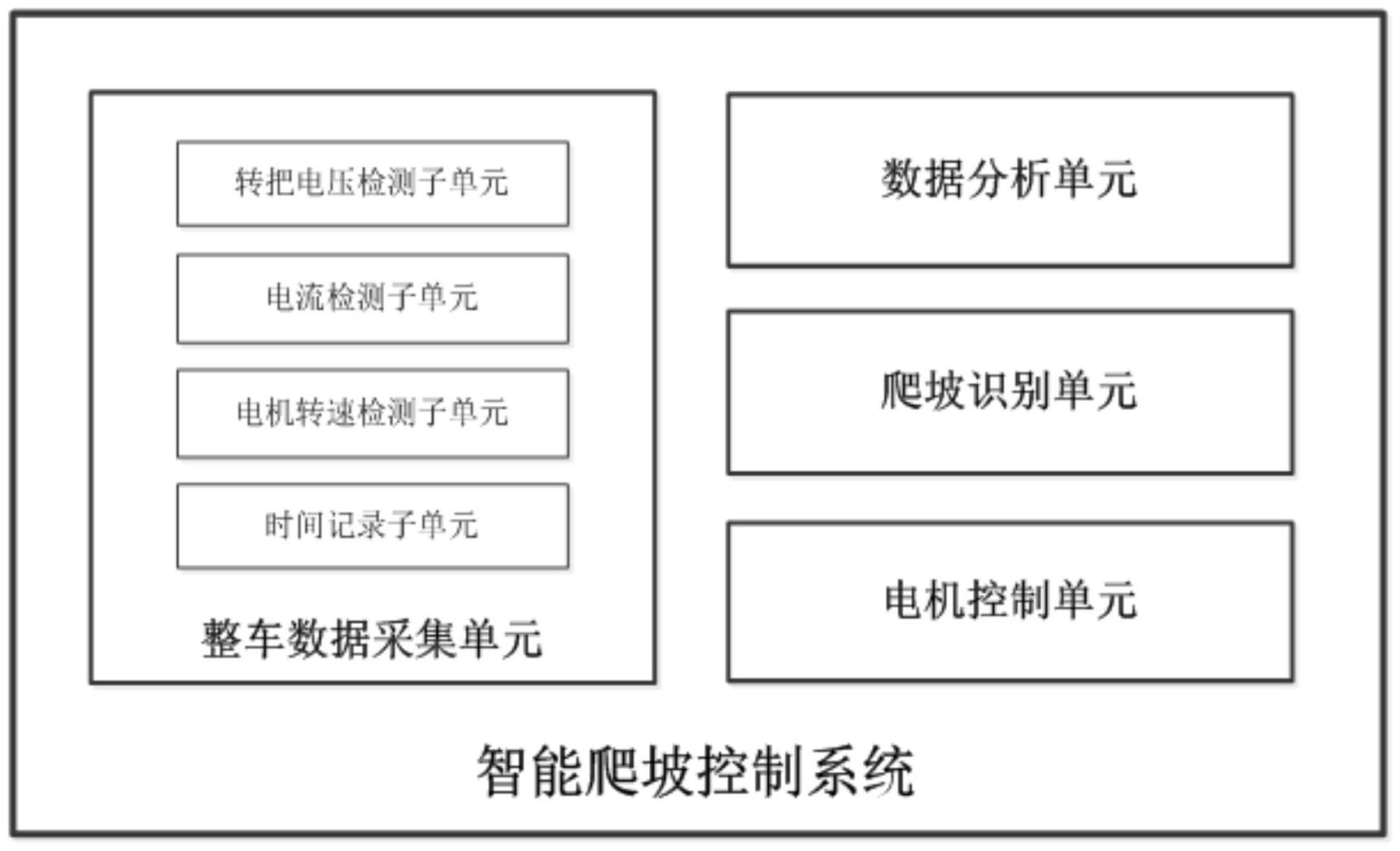
本发明涉及一种智能爬坡控制系统、电动车及其方法,其主要技术特点是:智能爬坡控制系统包括整车数据采集单元、数据分析单元、爬坡判定单元和电机控制单元;智能爬坡电动车安装有智能爬坡控制系统;爬坡控制方法包括:判断整车线电流是否达到初始限流值且转把电压大于有效最高值;当整车线电流达到初始限流值且转把电压大于有效最高值时,进入爬坡识别阶段;若爬坡扭矩不足,则进入预设定爬坡程序;当满足爬坡程序退出条件时,恢复初始程序。本发明能够智能识别爬坡路况,可以使电动车既可以在平路可靠行驶,又能够在爬坡时动力充足,有效提升了电动自行车的使用性能,更好的满足广大用户的需求。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有