

授权公布号:CN207942344U
一种电动冲击扳手
有效
申请
2018-03-09
申请公布
1970-01-01
授权
2018-10-09
预估到期
2028-03-09
| 申请号 | CN201820325496.3 |
| 申请日 | 2018-03-09 |
| 授权公布号 | CN207942344U |
| 授权公告日 | 2018-10-09 |
| 分类号 | B25B21/02;B25B23/147 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 黄山市星河机器人有限公司 |
| 申请人地址 | 安徽省黄山市徽州区城北工业园 |
专利法律状态
2018-10-09
授权
状态信息
授权
摘要
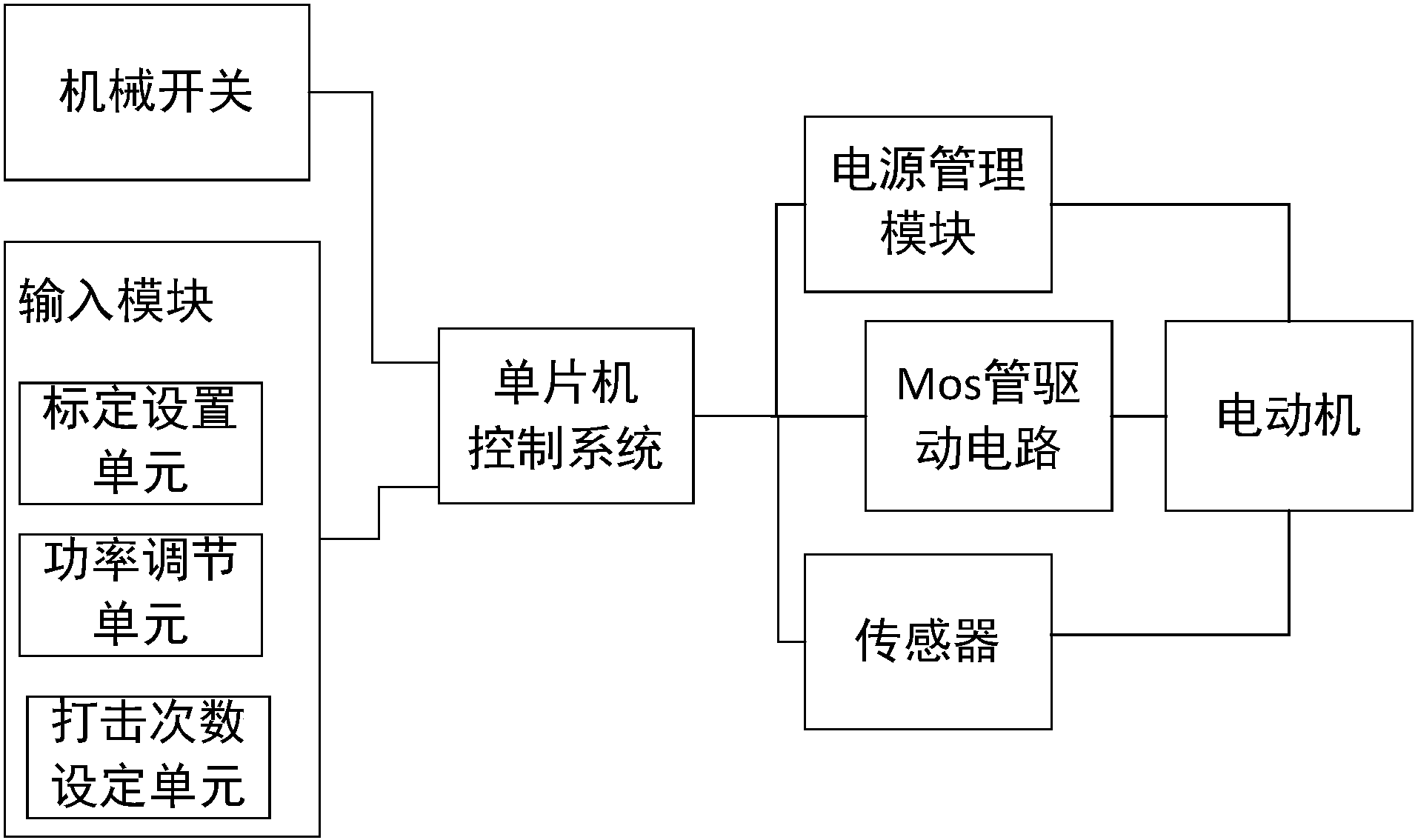
本实用新型涉及一种电动冲击扳手。电动冲击扳手包括扳手输出轴、扳手电机和扭矩控制系统,扳手电机设置有供电电源,且扳手电机带动扳手输出轴旋转以紧固螺栓;扭矩控制系统包括:传感器、输入模块及单片机;单片机分别与传感器、扳手电机及输入模块电性连接;单片机内置控制程序,且单片机内置扳手电机的功率‑扭矩的转换模型,转换模型用于将输入的功率、打击次数转换为对应的目标扭矩值;控制程序用于根据传感器检测的工作信号推算实时扭矩值,在等于预设的落座扭矩值之后,开始计数打击次数直至输入的打击次数,停止打击。本实用新型在紧固螺栓时,通过两阶段控制方式,实现无级调控,达到更好的装配力矩控制精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有