

授权公布号:CN105947046B
一种平衡车控制系统和平衡车
有效
申请
2016-06-12
申请公布
2016-09-21
授权
1970-01-01
预估到期
2036-06-12
| 申请号 | CN201610409163.4 |
| 申请日 | 2016-06-12 |
| 申请公布号 | CN105947046A |
| 申请公布日 | 2016-09-21 |
| 授权公布号 | CN105947046B |
| 分类号 | B62K3/00;B60L15/28 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 浙江航鹰锁业有限公司 |
| 申请人地址 | 北京市朝阳区利泽中园106号楼(望京集中办公区408号) |
专利法律状态
2020-05-12
专利申请权、专利权的转移
状态信息
专利权的转移 IPC(主分类):B62K3/00 登记生效日:20200422 变更前专利权人:北京美思安科技有限公司 变更前地址:100102 北京市朝阳区利泽中园106号楼(望京集中办公区408号) 变更后专利权人:浙江航鹰锁业有限公司 变更后地址:321300 浙江省金华市永康市经济开发区金山东路8号
2018-12-21
发明专利权授予
状态信息
授权
2016-10-19
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62K3/00;申请日:20160612
2016-09-21
发明专利申请公布
状态信息
公布
摘要
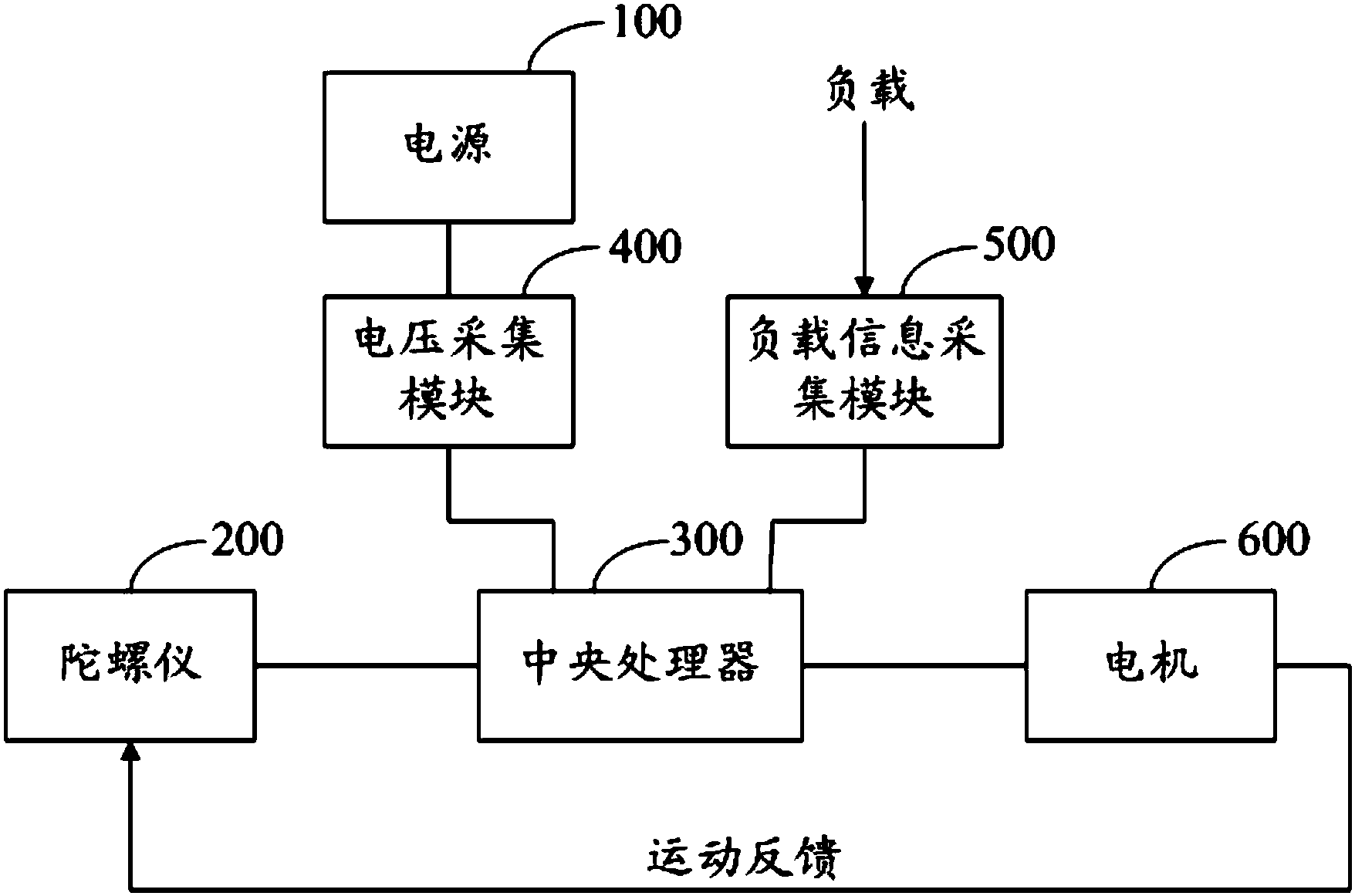
本发明提供一种平衡车控制系统和平衡车,系统包括电源、陀螺仪、电压采集模块、负载信息采集模块、中央处理器和电机。其中,中央处理器分别与陀螺仪、电压采集模块、负载信息采集模块连接,用于依据陀螺仪发送的平衡车的姿势状态、电压采集模块发送的输出电压值、以及负载信息采集模块发送的负载信息,调节所述平衡车控制系统的平衡车系统增益参数,进而依据调节后的平衡车系统增益参数生成控制指令,将控制指令发送至电机,以驱动电机运转。本发明随着平衡车的电源状态、负载信息的不同而灵活地调节平衡车控制系统中的平衡车系统增益参数,进而驱动控制电机运转,从而实现平衡车在不同负载情况下的自动平衡,保证了平衡车的平稳性和安全性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有