

授权公布号:CN104960396B
一种分层架构的电控空气悬架整车高度控制方法
有效
申请
2015-07-08
申请公布
2015-10-07
授权
2017-08-04
预估到期
2035-07-08
| 申请号 | CN201510394799.1 |
| 申请日 | 2015-07-08 |
| 申请公布号 | CN104960396A |
| 申请公布日 | 2015-10-07 |
| 授权公布号 | CN104960396B |
| 授权公告日 | 2017-08-04 |
| 分类号 | B60G17/015 |
| 分类 | 一般车辆; |
| 申请人名称 | 瑞立集团有限公司 |
| 申请人地址 | 吉林省长春市前进大街2699号 |
专利法律状态
2017-08-04
发明专利权授予
状态信息
授权
2016-12-28
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B60G 17/015;登记生效日:20161207;变更事项:申请人;变更前权利人:吉林大学;变更后权利人:吉林大学;变更事项:地址;变更前权利人:130012 吉林省长春市前进大街2699号;变更后权利人:130012 吉林省长春市前进大街2699号;变更事项:申请人;变更后权利人:瑞立集团有限公司
2015-11-11
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B60G 17/015;申请日:20150708
2015-10-07
发明专利申请公布
状态信息
公布
摘要
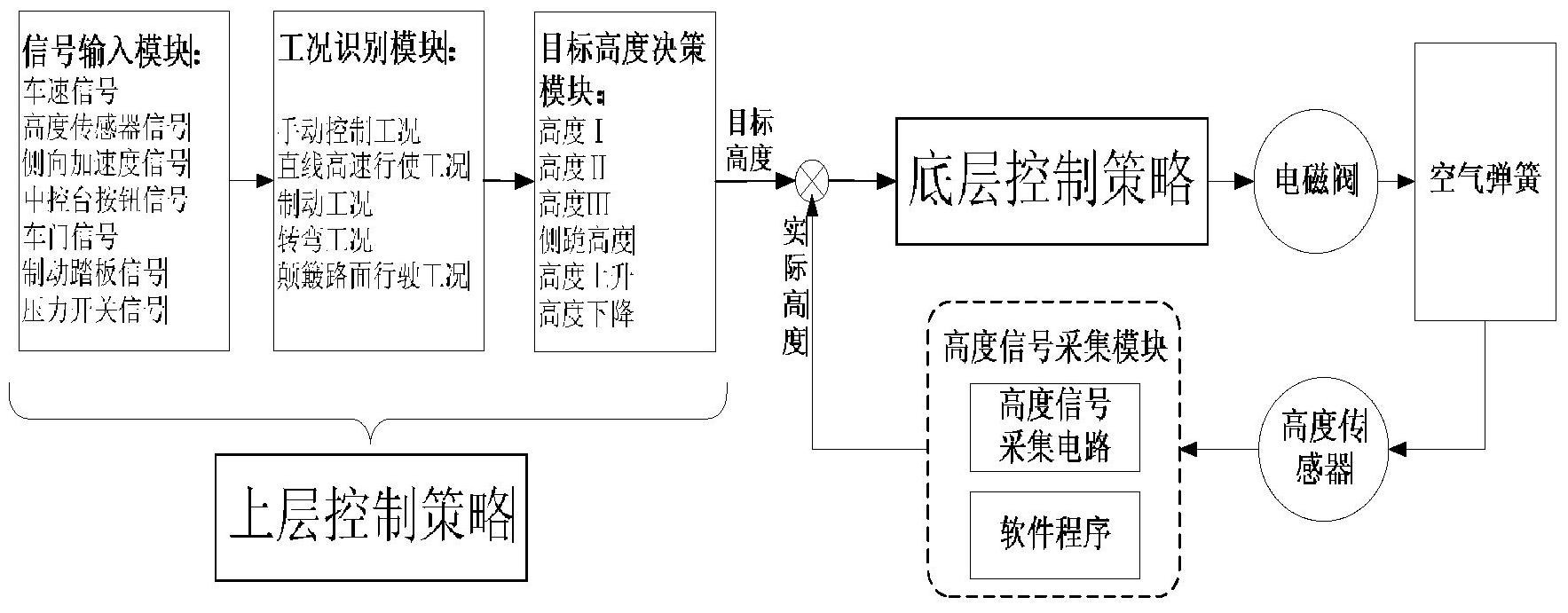
本发明提出了一种分层架构的电控空气悬架整车高度控制方法,包括上层的整车高度控制策略和底层的高度跟踪控制策略。整车高度控制策略根据车速、车身高度等信息识别出车辆行驶工况并决策出目标高度。高度跟踪控制策略根据车身实际高度与目标高度的差值和所设置的滞回区间,采用PD控制器实现车身目标高度的跟踪。利用车身高度传感器采集的高度信息,计算出车身平面位置,然后通过计算得到各个空气弹簧处的车身实际高度。本发明提出的控制方法可以根据车辆的行驶工况采取相应的车身高度控制策略,克服了车身高度调整过程中的过充过放以及振荡现象,同时在车身高度调节过程中对各个空气弹簧进行高度调节时兼顾了整车车身姿态的控制。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有