

授权公布号:CN114654466B
自动标定方法、装置、系统、电子设备及存储介质
有效
申请
2022-03-30
申请公布
2022-06-24
授权
2024-03-15
预估到期
2042-03-30
| 申请号 | CN202210331938.6 |
| 申请日 | 2022-03-30 |
| 申请公布号 | CN114654466A |
| 申请公布日 | 2022-06-24 |
| 授权公布号 | CN114654466B |
| 授权公告日 | 2024-03-15 |
| 分类号 | B25J9/16;B25J13/08 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海新时达电气股份有限公司 |
| 申请人地址 | 上海市嘉定区南翔镇新勤路289号 |
专利法律状态
2024-03-15
授权
状态信息
授权
2022-06-24
公布
状态信息
公布
摘要
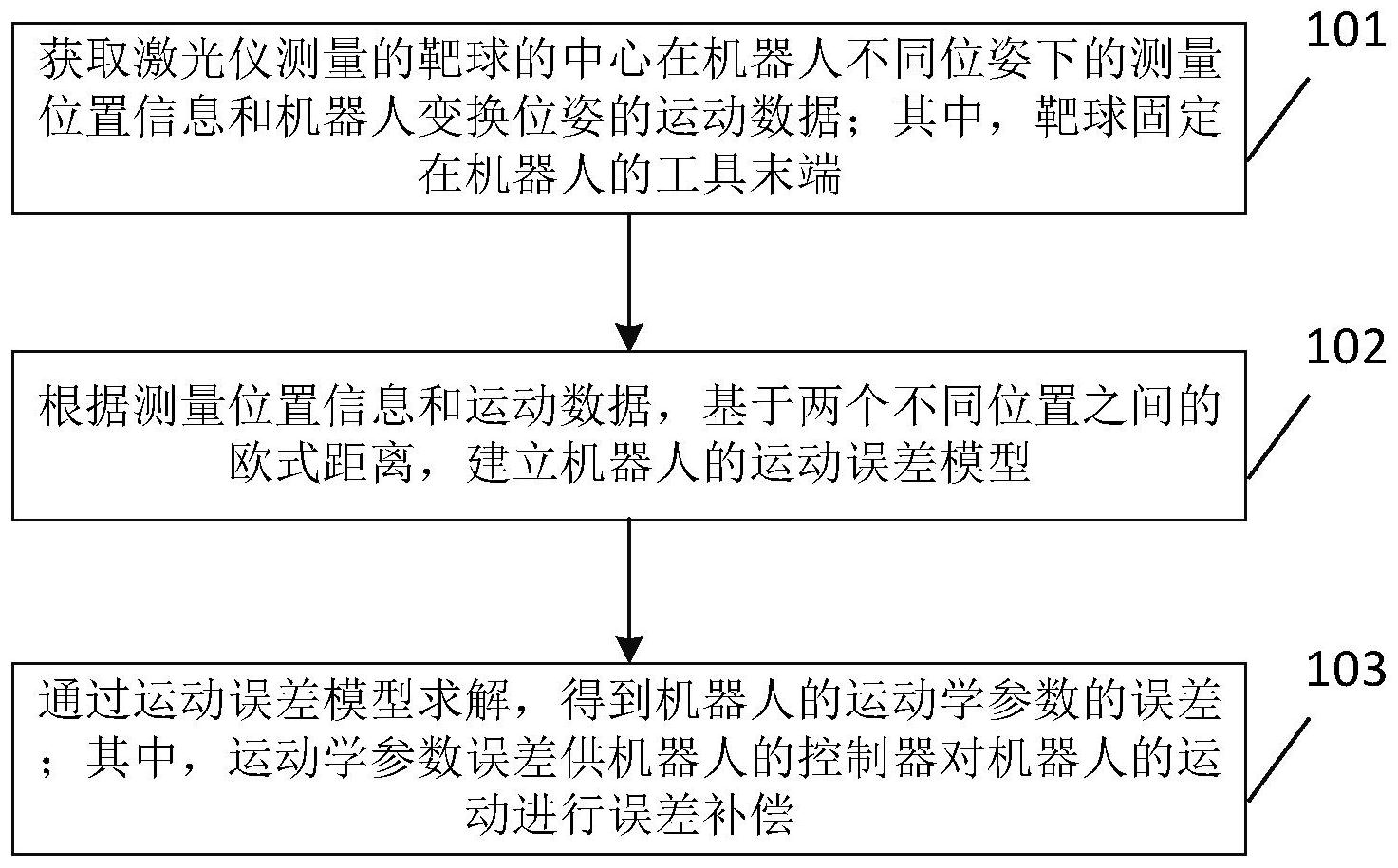
本发明实施例涉及机器人领域,公开了一种自动标定方法、装置、系统、电子设备及存储介质。本发明中,自动标定方法,包括以下步骤:获取激光仪测量的靶球的中心在机器人不同位姿下的测量位置信息和机器人变换位姿的运动数据;其中,靶球固定在机器人的工具末端;根据测量位置信息和运动数据,基于两个不同位置之间的欧式距离,建立机器人的运动误差模型;通过运动误差模型求解,得到机器人的运动学参数的误差;其中,运动学参数误差供机器人的控制器对机器人的运动进行误差补偿。本发明的自动标定方法,可以提高机器人的工具定位精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有