

授权公布号:CN106444536B
柔性伺服驱动系统
有效
申请
2016-11-17
申请公布
2017-02-22
授权
2023-08-11
预估到期
2036-11-17
| 申请号 | CN201611019777.8 |
| 申请日 | 2016-11-17 |
| 申请公布号 | CN106444536A |
| 申请公布日 | 2017-02-22 |
| 授权公布号 | CN106444536B |
| 授权公告日 | 2023-08-11 |
| 分类号 | G05B19/042 |
| 分类 | 控制;调节; |
| 申请人名称 | 上海新时达电气股份有限公司 |
| 申请人地址 | 上海市嘉定区南翔镇新勤路289号 |
专利法律状态
2023-08-11
授权
状态信息
授权
2017-03-22
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05B19/042;申请日:20161117
2017-02-22
公布
状态信息
公布
摘要
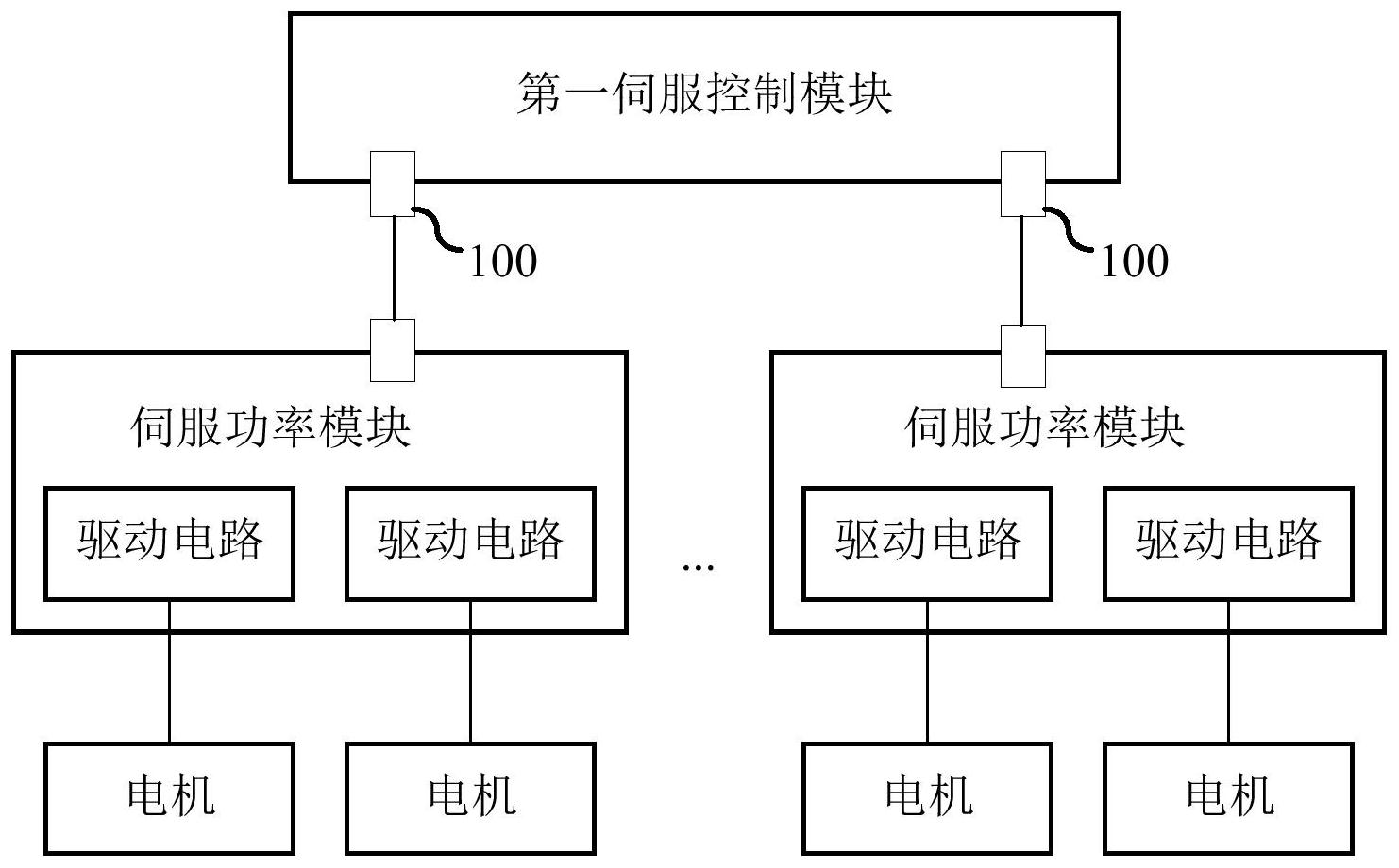
本发明涉及机器人技术领域,公开了一种柔性伺服驱动系统。本发明中,柔性伺服驱动系统包括:第一伺服控制模块、N个伺服功率模块与至多2N个电机;第一伺服控制模块上包括至少N个自适应网络接口;N个伺服功率模块分别通过N个自适应网络接口与第一伺服控制模块通信连接;N个伺服功率模块与第一伺服控制模块通过以太网通信;其中,每个伺服功率模块包含两组独立的驱动电路;每组驱动电路与电机对应连接;驱动电路用于驱动电机工作。本发明实施方式,可以实现伺服系统轴数、功率、IO数量的柔性配置和多台伺服电机的实时同步控制,并且在满足机器人伺服驱控要求的同时,减小机器人控制柜的体积,简化布线,降低机器人伺服系统成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有