

授权公布号:CN114750153B
机器人机械臂的运动控制系统、协作机器人及存储介质
有效
申请
2022-04-13
申请公布
2022-07-15
授权
2024-03-19
预估到期
2042-04-13
| 申请号 | CN202210387941.X |
| 申请日 | 2022-04-13 |
| 申请公布号 | CN114750153A |
| 申请公布日 | 2022-07-15 |
| 授权公布号 | CN114750153B |
| 授权公告日 | 2024-03-19 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 上海电气集团股份有限公司 |
| 申请人地址 | 上海市长宁区兴义路8号30层 |
专利法律状态
2024-03-19
授权
状态信息
授权
2022-08-02
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20220413
2022-07-15
公布
状态信息
公布
摘要
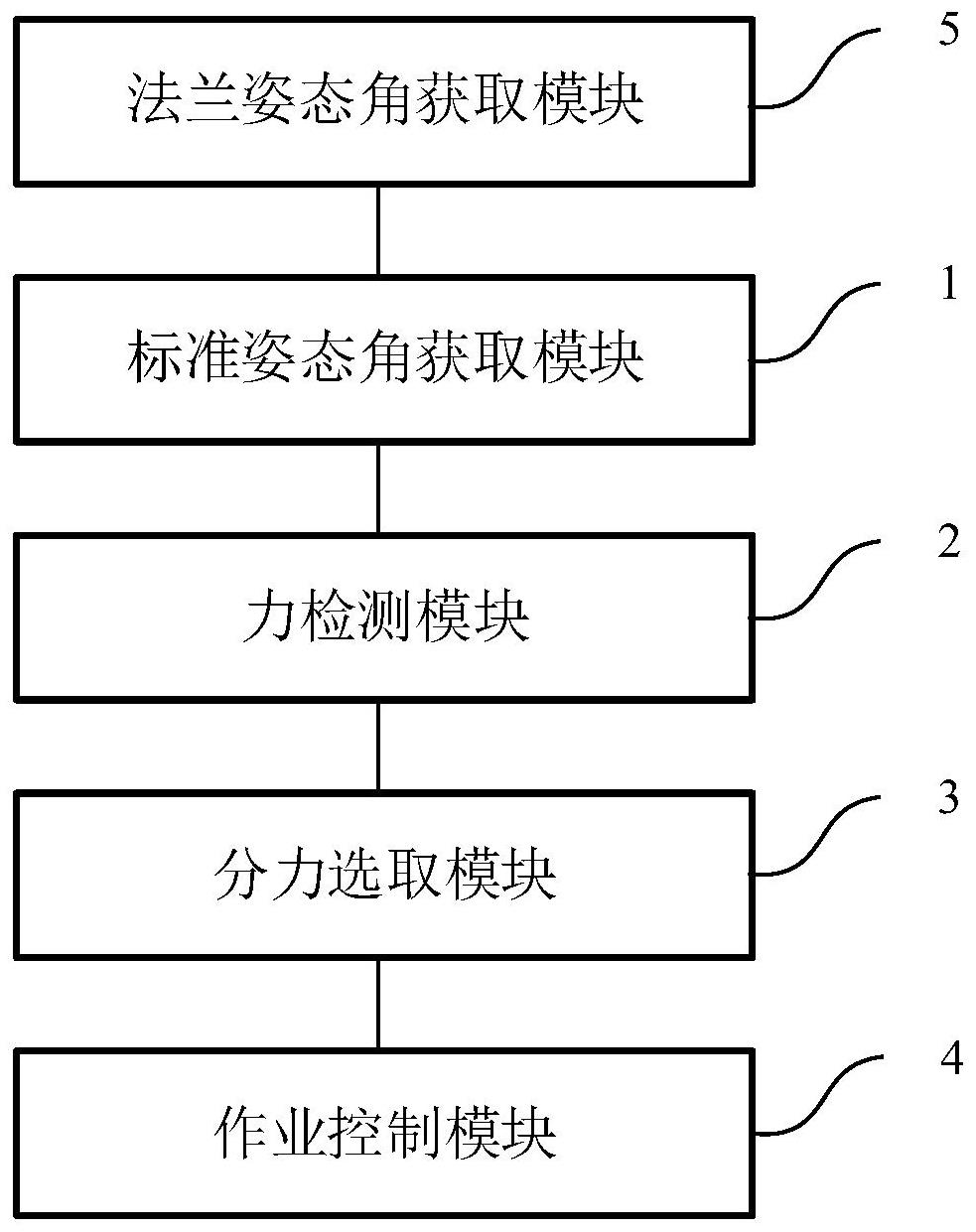
本发明公开了一种机器人机械臂的运动控制系统、协作机器人及存储介质,所述运动控制系统包括:标准姿态角获取模块获取机器人坐标系下末端工具以下一个作业拐点为运动目标时,当前作业点的标准欧拉姿态角;力检测模块实时检测在当前作业点作用于末端工具的作用力;分力选取模块将作用力分解到标准欧拉姿态角的三个角度方向上,并选取朝向下一个作业拐点的作用分力;作业控制模块基于作用分力控制末端工具运动到下一个作业拐点。本申请通过获取标准姿态角,并将实时的作用力分解到标准欧拉姿态角的三个角度方向上,并以朝向下一个作业拐点的作用分力进行后续控制,解决了传统协作机器人抖动、偏移、工具末端遇硬物反弹等缺点,使得操作手感灵活。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有