

授权公布号:CN109964556B
一种旋耕机控制系统及方法
有效
申请
2019-04-11
申请公布
2019-07-05
授权
2023-06-27
预估到期
2039-04-11
| 申请号 | CN201910291299.3 |
| 申请日 | 2019-04-11 |
| 申请公布号 | CN109964556A |
| 申请公布日 | 2019-07-05 |
| 授权公布号 | CN109964556B |
| 授权公告日 | 2023-06-27 |
| 分类号 | G05D1/02;A01B33/08 |
| 分类 | 农业;林业;畜牧业;狩猎;诱捕;捕鱼; |
| 申请人名称 | 湖南龙舟农机股份有限公司 |
| 申请人地址 | 湖南省岳阳市汨罗循环经济产业园区(汨罗市新市镇) |
专利法律状态
2023-06-27
授权
状态信息
授权
2020-08-21
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):A01B33/08;申请日:20190411
2019-07-05
公布
状态信息
公布
摘要
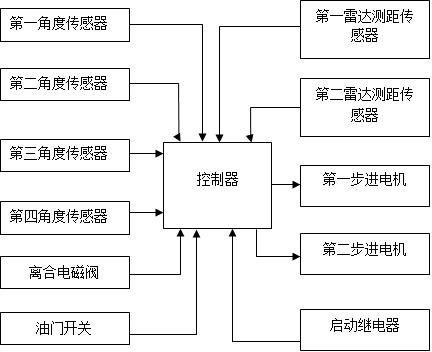
本发明公开了一种旋耕机控制系统及方法,在旋耕机上安装有控制器以及与控制器连接的第一步进电机、第二步进电机、第一角度传感器、第二角度传感器、第三角度传感器、第四角度传感器、离合电磁阀、油门开关、启动继电器;第一步进电机驱动旋耕机方向盘转动,第二步进电机驱动旋耕机的主变速操纵杆操作;第一角度传感器检测旋耕机方向盘方向角度,第二角度传感器检测旋耕机的主变速操纵杆位置;第三角度传感器检测旋耕机车身倾斜角度,第四角度传感器检测旋耕机的旋耕装置倾斜角度,离合电磁阀检测旋耕机的旋耕装置刀辊动力离合状态,油门开关检测旋耕机油门处于满速或者怠速状态,启动继电器检测旋耕机发动机启动或熄火。本发明的旋耕机控制系统及方法,将传统地手动操纵旋耕机变为自动控制旋耕机,实现旋耕机自动控制。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有