

授权公布号:CN105955275B
一种机器人路径规划方法及系统
有效
申请
2016-05-26
申请公布
2016-09-21
授权
2021-07-13
预估到期
2036-05-26
| 申请号 | CN201610362715.0 |
| 申请日 | 2016-05-26 |
| 申请公布号 | CN105955275A |
| 申请公布日 | 2016-09-21 |
| 授权公布号 | CN105955275B |
| 授权公告日 | 2021-07-13 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 华讯方舟科技有限公司 |
| 申请人地址 | 广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404 |
专利法律状态
2023-08-11
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G05D1/02;登记生效日:20230731;变更事项:专利权人;变更前:华讯方舟科技有限公司;变更后:深圳市华讯方舟光电技术有限公司;变更事项:地址;变更前:518000 广东省深圳市宝安区西乡宝田一路臣田工业区37栋1楼;变更后:518000 广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404
2023-05-16
专利权的保全及其解除
状态信息
专利权保全的解除;IPC(主分类):G05D1/02;申请日:20160526;授权公告日:20210713;解除日:20230421
2021-07-13
授权
状态信息
授权
2018-07-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20160526
2016-09-21
公布
状态信息
公布
摘要
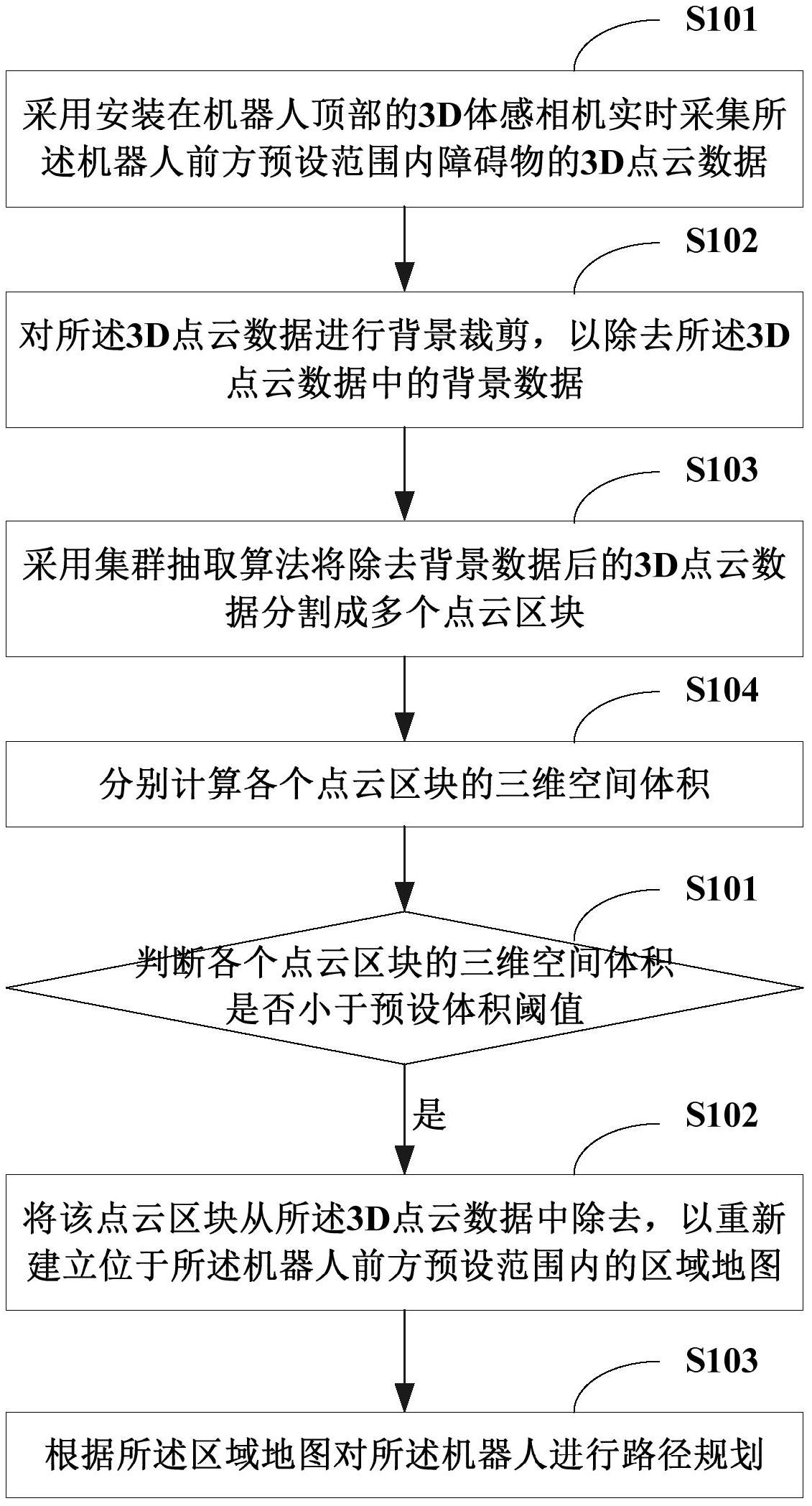
本发明提供一种机器人路径规划方法及系统,涉及电子技术领域。该方法包括:采用安装在机器人顶部的3D体感相机实时采集机器人前方预设范围内障碍物的3D点云数据;对3D点云数据进行背景裁剪,以除去3D点云数据中的背景数据;采用集群抽取算法将除去背景数据后的3D点云数据分割成多个点云区块;分别计算各个点云区块的三维空间体积;判断各个点云区块的三维空间体积是否小于预设体积阈值;若小于预设体积阈值,则将该点云区块从所述3D点云数据中除去,以重新建立位于机器人前方预设范围内的区域地图;根据区域地图进行路径规划。本发明能够提高机器人的整体路径规划能力,使机器人在进行路径规划时忽略体积小的障碍物,为机器人规划出最优路径。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有