

授权公布号:CN105945994B
一种机器人头部关节舵机位置的校准方法、装置及机器人
有效
申请
2016-05-10
申请公布
2016-09-21
授权
2021-05-25
预估到期
2036-05-10
| 申请号 | CN201610305166.3 |
| 申请日 | 2016-05-10 |
| 申请公布号 | CN105945994A |
| 申请公布日 | 2016-09-21 |
| 授权公布号 | CN105945994B |
| 授权公告日 | 2021-05-25 |
| 分类号 | B25J19/00;B25J17/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 华讯方舟科技有限公司 |
| 申请人地址 | 广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404 |
专利法律状态
2023-07-21
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):B25J 19/00;专利号:ZL2016103051663;登记生效日:20230711;变更事项:专利权人;变更前权利人:华讯方舟科技有限公司;变更后权利人:深圳市华讯方舟光电技术有限公司;变更事项:地址;变更前权利人:518000 广东省深圳市宝安区西乡宝田一路臣田工业区37栋1楼;变更后权利人:518000 广东省深圳市宝安区西乡街道臣田社区臣田工业区37栋404
2023-05-16
专利权的保全及其解除
状态信息
专利权保全的解除;IPC(主分类):B25J19/00;申请日:20160510;授权公告日:20210525;解除日:20230421
2021-07-23
专利权的保全及其解除
状态信息
专利权的保全;IPC(主分类):B25J19/00;申请日:20160510;授权公告日:20210525;登记生效日:20210630
2021-05-25
授权
状态信息
授权
2018-07-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J19/00;申请日:20160510
2016-09-21
公布
状态信息
公布
摘要
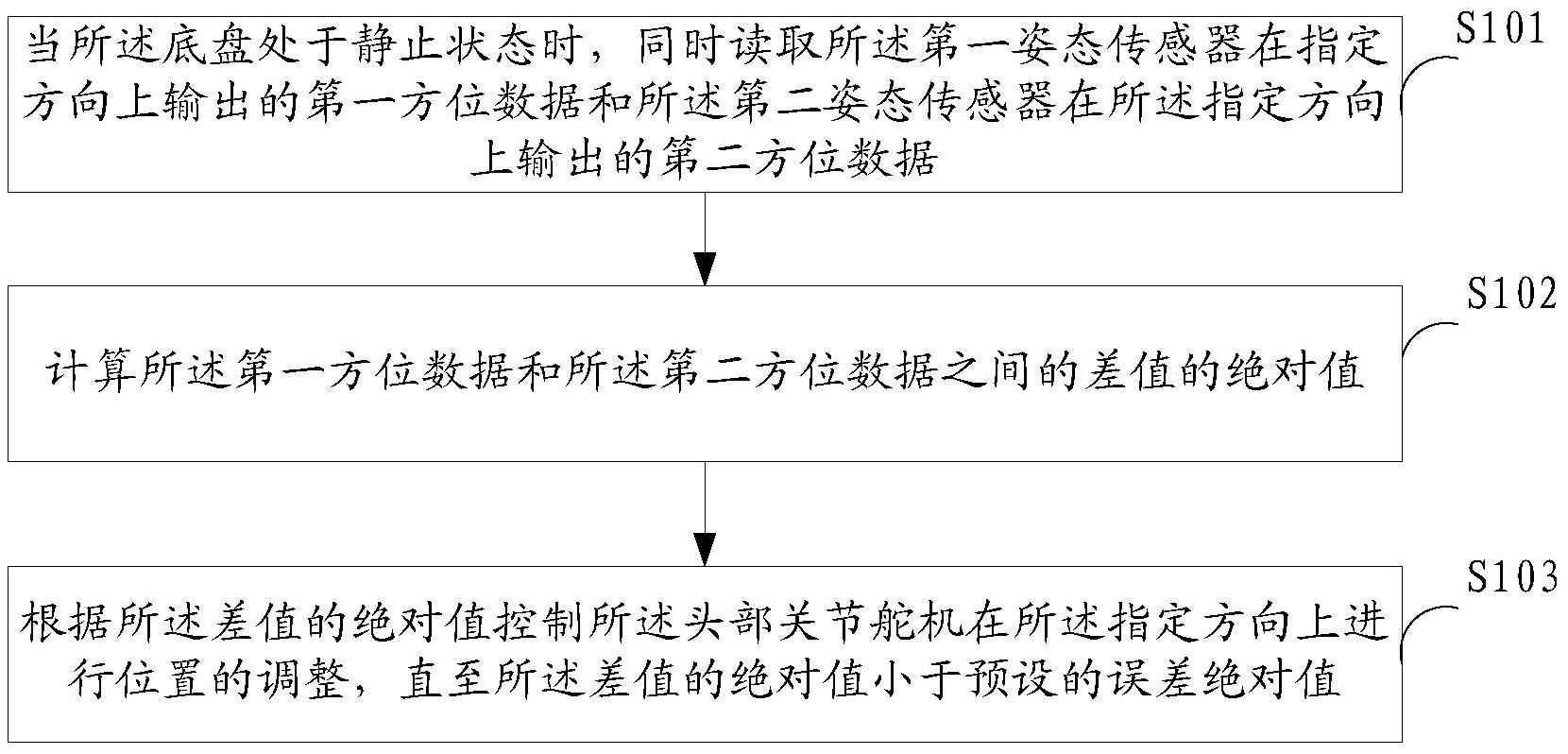
本发明适用于机器人设计与制造技术领域,提供了一种机器人头部关节舵机位置的校准方法、装置及机器人,所述机器人包括头部、底盘和头部关节舵机,所述头部安装有第一姿态传感器,所述底盘上安装有第二姿态传感器,所述方法包括:当所述底盘处于静止状态时,同时读取所述第一姿态传感器在指定方向上输出的第一方位数据和所述第二姿态传感器在所述指定方向上输出的第二方位数据;计算所述第一方位数据和所述第二方位数据之间的差值的绝对值;根据所述差值的绝对值控制所述头部关节舵机在所述指定方向上进行位置的调整,直至所述差值的绝对值小于预设的误差绝对值。本发明,降低了机器人的头部在相关自由度方向上误差的发生,方便了产线操作。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有